





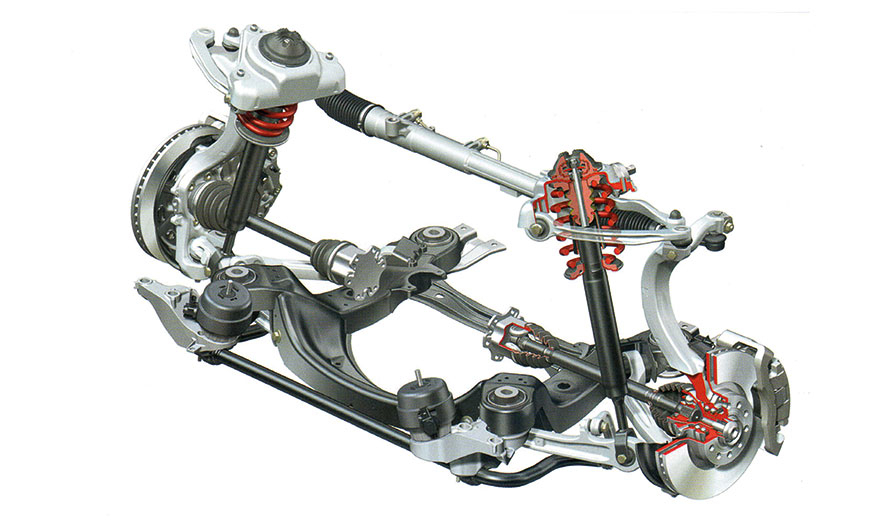
Rys. 1. Układ kierowniczy samochodu osobowego z zębatkową przekładnią kierowniczą umieszczoną wysoko (elementy układu kierowniczego umieszczone nad przegubami napędowymi) – źródło: Audi
Układ kierowniczy jest jednym z głównych układów podwozia pojazdu samochodowego. Jego stan techniczny ma bardzo istotny wpływ na bezpieczeństwo jazdy i stopień zmęczenia kierowcy. Panowanie nad kierunkiem jazdy (oprócz panowania nad prędkością) to jeden z podstawowych warunków bezpieczeństwa ruchu drogowego.
1. Wprowadzenie
Układem kierowniczym pojazdu samochodowego nazywamy zespół mechanizmów umożliwiających kierowanie, czyli utrzymanie kierunku jazdy wybranego przez kierowcę. Układy kierownicze współczesnych pojazdów samochodowych na ogół składają się z (rys. 1 i 2):
- mechanizmu kierowniczego,
- mechanizmu zwrotniczego,
- mechanizmu wspomagającego.

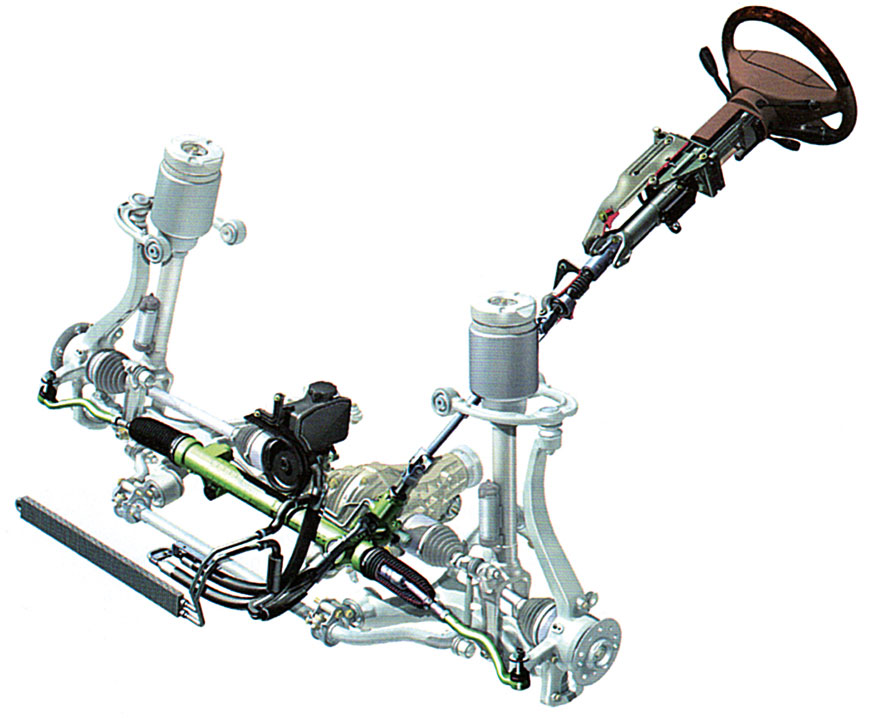
Rys. 2. Układ kierowniczy samochodu osobowego z zębatkową przekładnią kierowniczą umieszczoną nisko (krótkie drążki poprzeczne, elementy układu kierowniczego umieszczone w sąsiedztwie przegubów napędowych) – źródło: Mercedes-Benz
Mechanizm kierowniczy to zespół, na który działa bezpośrednio kierowca i za jego pomocą utrzymuje koła kierowane w położeniu środkowym lub dokonuje ich skrętu. Mechanizm zwrotniczy umożliwia jednoczesne skręcanie kół kierowanych, zapewniając wymaganą współzależność chwilowych kątów ich skrętu. Natomiast mechanizm wspomagający stanowi urządzenie, które wykonuje część pracy kierowania kosztem energii pobieranej z zewnętrznego źródła. Urządzenia wspomagające ułatwiają pracę kierowcy i zmniejszają jego wysiłek, a tym samym zwiększają bezpieczeństwo jazdy. W układach kierowniczych współczesnych pojazdów mechanicznych stosuje się różne rozwiązania konstrukcyjne mechanizmów wspomagających. W zależności od zasady działania dzieli się je na mechanizmy:
- hydrauliczne, w których czynnikiem roboczym jest ciecz tłoczona przez pompę napędzaną bezpośrednio od silnika pojazdu;
- elektrohydrauliczne, w których ciecz będąca czynnikiem roboczym jest tłoczona przez pompę napędzaną oddzielnym silnikiem elektrycznym;
- elektryczne, w których obwód hydrauliczny nie występuje, a elementem wspomagającym jest silnik elektryczny.
Wszystkie mechanizmy wspomagające muszą zapewniać możliwość kierowania pojazdem pomimo jego awarii oraz niesprawności.
Obecnie coraz częściej stosowane są układy kierownicze o zmiennym przełożeniu. Muszą być one zbudowane tak, aby zapewniać kierowalność pojazdu w przypadku awarii sterującego systemu elektronicznego lub jakiegokolwiek innego (np. wspomagania). W praktyce oznacza to konieczność zastosowania układu mechanicznego, gwarantującego stałe połączenie kół jezdnych z kierownicą. Układ kierowniczy o zmiennym przełożeniu składa się z: koła kierownicy, kolumny kierownicy, przekładni planetarnej oraz zębatkowej przekładni kierowniczej o stałym przełożeniu. Elementem zmieniającym całkowite przełożenie układu kierowniczego jest przekładnia planetarna wbudowana na końcu kolumny kierowniczej (rys. 3).
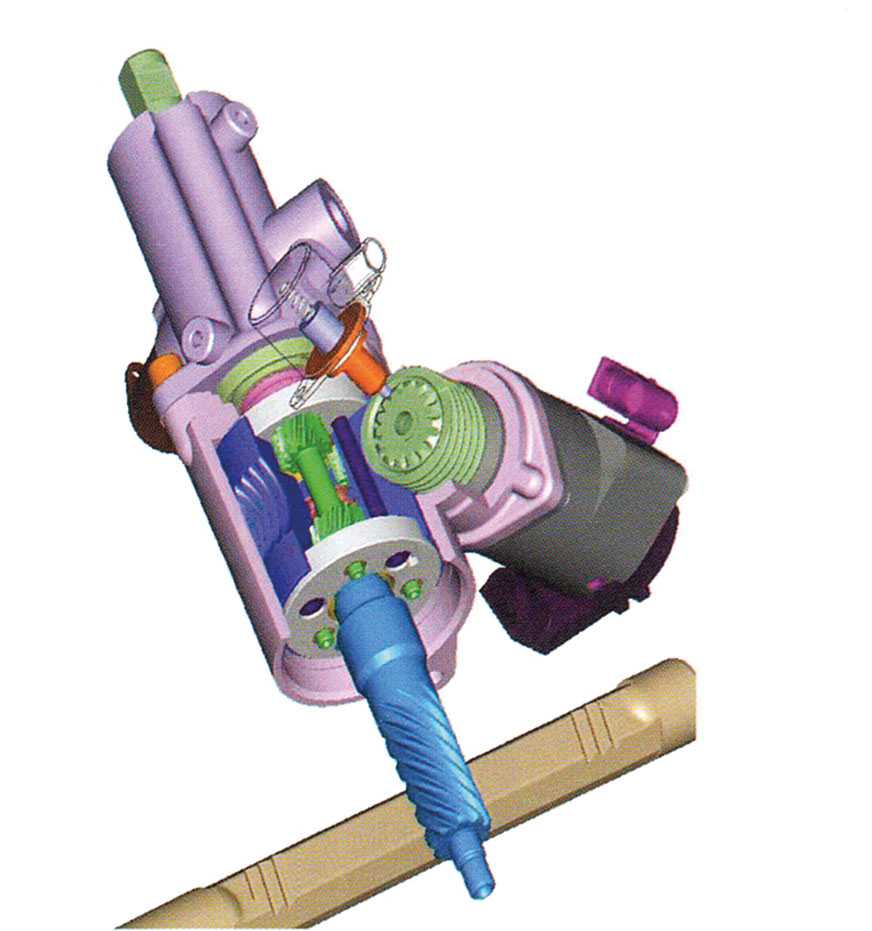
Rys. 3. Zespół przekładni planetarnej z silnikiem elektrycznym w układzie kierowniczym o zmiennym przełożeniu (źródło: Bosch)
Nowoczesne rozwiązanie konstrukcyjne stanowi elektryczny układ kierowniczy typu Steer-by-Wire, który opracowała m.in. firma Delphi (rys. 4). Nie występuje w nim mechaniczne połączenie koła kierownicy z przekładnią kierowniczą. Zostało ono zastąpione przewodami elektrycznymi. Przykładem samochodu, w którym zastosowano układ kierowniczy typu Steer-by-Wire, jest Infiniti Q50 firmy Nissan. Układ ma zespół sterowników (głównych i awaryjnych), dwa niezależne siłowniki przy przekładni zębatej i sprzęgło bezpieczeństwa, które w razie potrzeby łączy mechanicznie kierownicę z kołami (rys. 5). Najnowszym samochodem z układem kierowniczym typu Steer-by-Wire, w którym zrezygnowano z fizycznego połączenia między kolumną kierownicy a przekładnią, jest Lexus RZ. Przekazywanie danych z koła kierownicy do kół przednich jest całkowicie elektroniczne. Podczas obrotu kierownicy wysyłane są sygnały do siłownika, który napędza listwę zębatą przekładni, podczas gdy drugi siłownik połączony z kierownicą zapewnia sprzężenie zwrotne i wyczucie nawierzchni drogi przez kierowcę. Taki układ kierowniczy jest o 10 kg cięższy od układu standardowego.
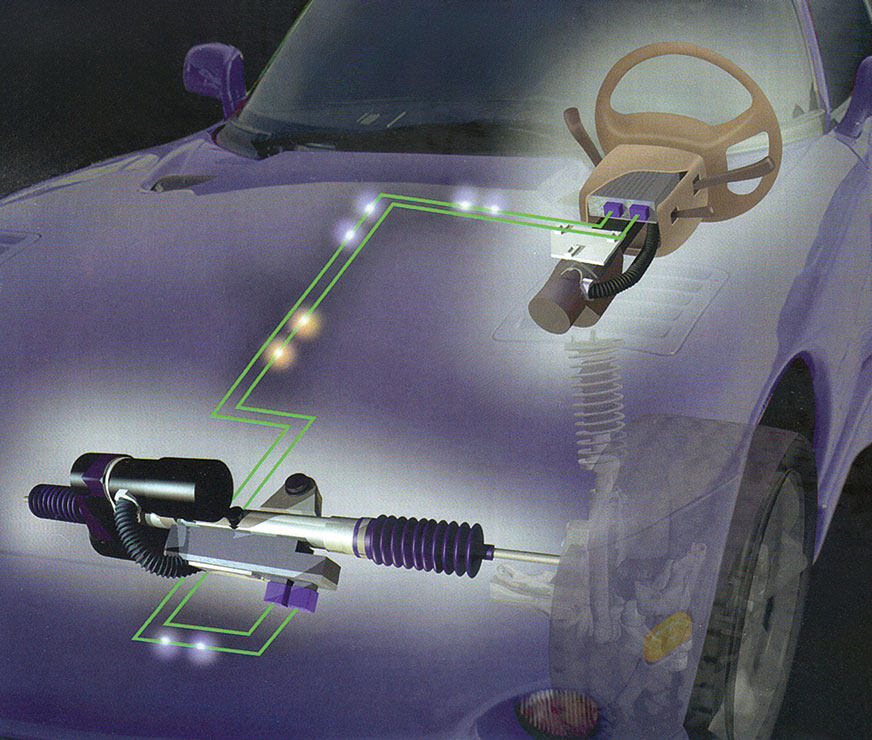
Rys. 4. Elektryczny układ kierowniczy typu Steer-by-Wire opracowany przez firmę Delphi (źródło: Delphi)
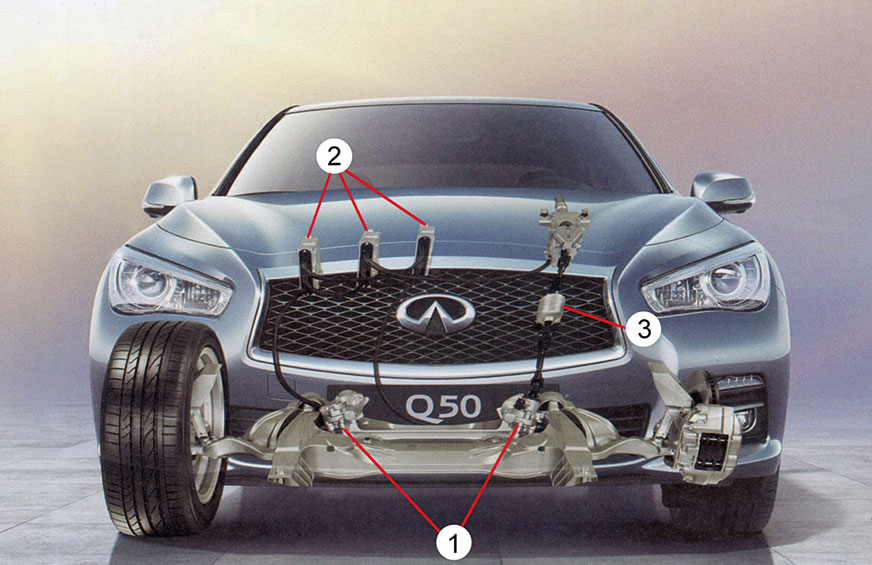
Rys. 5. Elektryczny układ kierowniczy typu Steer-by-Wire stosowany w samochodzie Infiniti Q50 firmy Nissan (źródło: Infiniti) 1 – niezależne siłowniki przy przekładni zębatej, 2 – zespół trzech sterowników, 3 – sprzęgło bezpieczeństwa
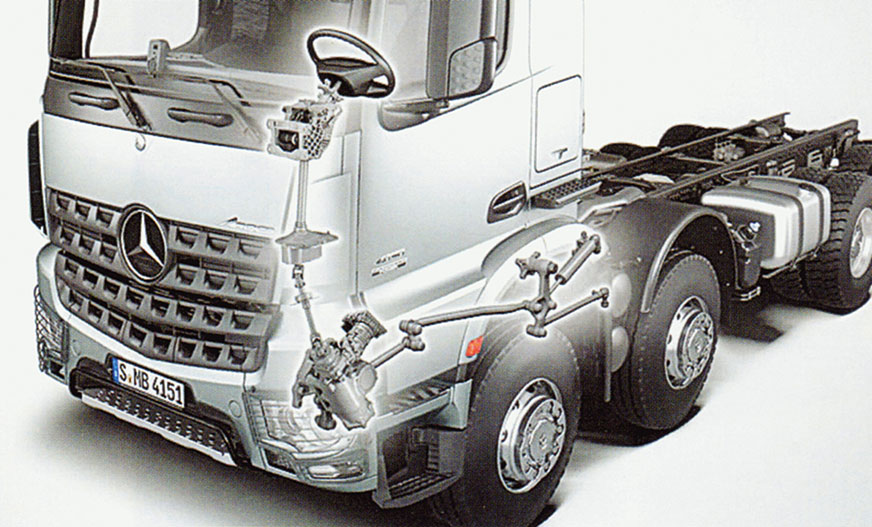
Rys. 6. Przykład układu kierowania dwiema osiami przednimi zastosowanego w pojeździe ciężarowym (źródło: Mercedes-Benz)
Niektóre pojazdy wyposaża się w układy kierownicze o dwóch osiach kierowanych. Kierowanie drugiej osi odbywa się dzięki połączeniu specjalnym układem drążków mechanizmu zwrotniczego pierwszej osi z symetrycznie umieszczonym mechanizmem zwrotniczym drugiej osi (rys. 6).
2. Pojęcia związane z procesem kierowania
W procesie kierowania pojazdem samochodowym istotne są zagadnienia dotyczące zwrotności, kierowalności i stateczności ruchu. Pod tymi pojęciami rozumie się zespół cech konstrukcyjnych i eksploatacyjnych prowadzących do polepszenia tego procesu. Dotyczy to w równym stopniu wymiarów i ciężaru pojazdu, rozmieszczenia jego układów i mechanizmów, konstrukcji układu kierowniczego oraz opon i ich odkształcalności.
Zwrotność samochodu sprowadza się, testując możliwości manewrowania nim na ograniczonej przestrzeni, czyli łatwość wykonywania skrętów o małym promieniu. Pod pojęciem kierowalności samochodu rozumie się zdolność do utrzymania żądanego kierunku ruchu i zmian tego kierunku zgodnie z życzeniem kierowcy.
Pojazd samochodowy o dobrej stateczności poddany krótkotrwałemu impulsowi zewnętrznemu spychającemu go z zamierzonego toru jazdy samoczynnie dąży do poprzedniego stanu ruchu. Z kolei samochód odznaczający się złą statecznością jest trudny do prowadzenia i wymaga dużej koncentracji uwagi kierowcy.
Stabilizacją kół kierowanych pojazdu nazywa się zdolność skręconych kół kierowanych do samoczynnego powrotu w czasie jazdy do położenia na wprost i zdolność utrzymania prostoliniowego kierunku ruchu na drodze poziomej. Własności stabilizacyjne kół kierowanych uzyskuje się przez oddziaływanie na nie momentu stabilizacyjnego, powstającego w efekcie działania sił reakcji podłoża. Moment stabilizacyjny kół kierowanych uzyskiwany jest głównie przez odpowiednie ustawienie osi obrotu zwrotnic i sprężystość opon pojazdu.
Stateczność, kierowalność pojazdu i stabilizacja kół kierowanych są ze sobą powiązane, a niektóre warunkujące je czynniki są wspólne (np. kąty ustawienia kół kierowanych).
3. Metodyka badania układu kierowniczego
Podczas eksploatacji pojazdu samochodowego na skutek zużywania i osłabienia mocowania elementów następuje pogorszenie stanu technicznego układu kierowniczego. Utrzymanie zalecanych przez producenta pojazdu parametrów ustawienia kół kierowanych zapewnia ich stabilizację, stateczność i kierowalność samochodu, redukcję zużycia ogumienia i elementów osi przedniej oraz zużycia paliwa. Znajomość wartości kątów skrętu kół przednich pozwala ocenić, czy mechanizm zwrotniczy działa właściwie. Przyczyną zmiany określonych przez wytwórcę kątów skrętu kół może być niewłaściwa regulacja długości lub odkształcenia drążków mechanizmu zwrotniczego.
Badania diagnostyczne układu kierowniczego pojazdu mają na celu uzyskanie odpowiedzi na następujące pytania:
- Czy wielkości zużycia elementów sprawdzanego układu nie przekraczają dopuszczalnych wartości?
- Czy parametry ustawienia kół i osi jezdnych mieszczą się w dopuszczalnych granicach (założonych przez wytwórcę)?
- Czy badany układ działa prawidłowo?
W przypadku wykrycia nieprawidłowości w działaniu układu kierowniczego pojazdu należy określić ich przyczyny i ustalić zakres czynności regulacyjnych lub naprawczych celem ich usunięcia.
Po zakończeniu diagnozowania układu kierowniczego pojazdu należy opracować diagnozę, która powinna zawierać odpowiedzi na następujące pytania:
- Jaki jest aktualny stan techniczny układu kierowniczego?
- Jakie działania w zakresie obsługiwania technicznego lub naprawy w przypadku wystąpienia usterek w badanym układzie należy podjąć?
Aby rozwiązać ten podstawowy z diagnostycznego punktu widzenia problem, należy uprzednio znać:
- przeznaczenie układu (zespołu, mechanizmu),
- charakterystykę techniczno-eksploatacyjną badanego układu,
- wymagania eksploatacyjne stawiane układowi,
- warunki zdatności technicznej określające stan techniczny układu,
- możliwą do realizacji (w konkretnych warunkach) metodę badań,
- zasady interpretacji wyników wykonanego badania układu.
Warunkiem wyjściowym prawidłowego diagnozowania i obsługiwania układu kierowniczego jest zawsze znajomość jego charakterystyki technicznej (cech konstrukcyjnych układu, jego budowy i zasady działania) i eksploatacyjnej (węzłów regulacyjnych i obsługowych, materiałów eksploatacyjnych, wartości parametrów diagnostycznych) danego typu pojazdu.
4. Wymagania eksploatacyjne stawiane układowi kierowniczemu
Wymaganiami eksploatacyjnymi nazywamy zmienną podczas eksploatacji pojazdu część zbioru wymagań konstrukcyjnych, które powinien spełniać dany układ. Dla użytkownika pojazdu stanowią one bezpośrednie kryteria prawidłowości działania danego układu. Z diagnostycznego punktu widzenia wymagania eksploatacyjne stawiane danemu układowi pojazdu są jednocześnie symptomami jego stanu technicznego.
Układom kierowniczym pojazdów samochodowych stawiane są następujące wymagania eksploatacyjne [2]:
- stateczność kierunkowa (dążność do samoczynnego utrzymywania prostoliniowego toru ruchu),
- dążność do samoczynnego powrotu skręconych kół kierowanych do położenia środkowego (jazdy na wprost),
- prawidłowa kinematyka skrętu kół kierowanych,
- optymalne opóźnienie zadziałania układu kierowniczego,
- nieprzenoszenie drgań kół kierowanych na koło kierownicy,
- płynne działanie układu kierowniczego,
- symetria działania układu kierowniczego,
- brak istotnego wpływu na zużycie bieżników opon.
5. Warunki zdatności technicznej układu kierowniczego
Warunki zdatności (sprawności) technicznej układu kierowniczego określają jego stan techniczny. Część zbioru warunków zdatności technicznej układu wyrażana jest w sposób opisowy (np. kompletność, prawidłowość zamocowania, brak uszkodzeń mechanicznych), a część za pomocą parametrów diagnostycznych. Zakres spełnienia opisowych warunków zdatności technicznej oceniany jest na ogół w sposób organoleptyczny, natomiast do pomiaru wartości parametrów diagnostycznych stosowane są metody przyrządowe.
Konstruktorzy pojazdów starają się nadawać kołom jezdnym właściwe ustawienie (płaszczyzna symetrii koła równoległa do toru jazdy pojazdu i prostopadła do nawierzchni jezdni). W rzeczywistych warunkach ustawienie to powinno dotyczyć pojazdu w ruchu. Badania na stanowiskach diagnostycznych odbywają się jednak w warunkach statycznych. Ustawienie kół jest wówczas inne, musi bowiem uwzględniać ich przemieszczenia podczas jazdy.
Producenci pojazdów samochodowych określają doświadczalnie najkorzystniejsze ustawienie kół jezdnych, uwzględniając głównie bezpieczeństwo jazdy oraz zużycie ogumienia i paliwa.
Bezpieczeństwo jazdy w stosunku do układów kierowniczego i jezdnego ocenia się według takich kryteriów, jak stateczność kierunkowa i kierowalność. Ustawienie kół w celu spełnienia tych kryteriów jest problemem złożonym. Występują tu przeciwstawne wskazania, na przykład: im większa zbieżność kół, tym lepsza stateczność kierunkowa, ale jednocześnie wzrastają opory toczenia kół jezdnych, a w konsekwencji rośnie zużycie ogumienia i paliwa.
W tej sytuacji wytwórcy pojazdów określają zalecane (kompromisowe) wartości liczbowe parametrów ustawienia kół jezdnych, uzyskane na podstawie wyników badań prototypów oraz eksploatacyjnych badań trwałościowych. Zalecane wartości stanowią wyważony kompromis i obowiązują dla ściśle określonych warunków pomiarów pojazdu na stanowisku diagnostycznym.
Wartości liczbowe parametrów diagnostycznych podawane przez producentów odnoszą się więc do pomiarów w warunkach statycznych, to znaczy gdy pojazd ustawiony jest na stanowisku kontrolnym. Wartości te dla konkretnych typów pojazdów są podane w:
- instrukcjach fabrycznych samochodów,
- zestawieniach danych diagnostycznych i regulacyjnych opracowywanych przez wydawnictwa profesjonalne (np. Autodata) i ośrodki naukowo-badawcze (np. Instytut Transportu Samochodowego),
- bazie danych urządzeń komputerowych do kontroli ustawienia kół i osi jezdnych pojazdów.
Parametrami diagnostycznymi układu kierowniczego pojazdu decydującymi o jego poprawnej pracy i wpływającymi na bezpieczeństwo ruchu są:
- parametry określające ustawienie kół jezdnych: zbieżność (całkowita, połówkowa), kąt pochylenia koła, kąt pochylenia osi sworznia zwrotnicy i kąt wyprzedzenia osi sworznia zwrotnicy;
- parametry określające współzależność kątów skrętu kół kierowanych: kontrolne kąty skrętu, maksymalne kąty skrętu;
- parametry ustawienia osi: odchylenie osi geometrycznej jazdy od osi symetrii, nierównoległość osi pojazdu, przesunięcie boczne kół (nieśladowość kół);
- sumaryczny luz układu kierowniczego;
- opory skrętu kół kierowanych (opory mechaniczne układu kierowniczego);
- parametry charakteryzujące mechanizm wspomagający układu kierowniczego.
Ustawienie koła jezdnego charakteryzowane jest zwykle jego pochyleniem oraz zbieżnością kół danej osi. Koła kierowane są dodatkowo charakteryzowane pochyleniem i wyprzedzeniem osi sworznia zwrotnicy. Parametrami wpływającymi na prawidłową kinematykę toczenia się kół kierowanych są kontrolne i maksymalne kąty skrętu. Również pozostałe parametry decydują o prawidłowym działaniu układu kierowniczego i mają wpływ na bezpieczeństwo jazdy.
Warunki zdatności technicznej układu kierowniczego pojazdu można podzielić na dwie grupy:
- określające stopień zużycia układu kierowniczego,
- określające geometrię układu kierowniczego/jezdnego.
5.1 Warunki zdatności technicznej określające stopień zużycia układu kierowniczego
W dalszej części artykułu wymieniono warunki zdatności technicznej określające stopień zużycia układu kierowniczego pojazdu.
1. Kompletność układu – powinien być skompletowany zgodnie z dokumentacją techniczną pojazdu.
2. Prawidłowość zamocowania elementów układu – praktycznie dotyczy to pewności zamocowania przekładni i kolumny kierowniczej, wsporników, zespołów mechanizmu wspomagającego itp.
3. Właściwy stan zewnętrzny elementów układu – brak uszkodzeń mechanicznych (pęknięcia, zgięcia drążków, wycieki z przekładni itp.).
4. Prawidłowy luz sumaryczny w układzie kierowniczym pojazdu – o wartości luzu sumarycznego decydują:
- luzy na sworzniach zwrotnic i w ułożyskowaniu piast kół,
- luzy w połączeniach przegubowych mechanizmów zwrotniczego i kierowniczego,
- luzy w przekładni kierowniczej.
5. Prawidłowa wartość oporów skrętu kół kierowanych (siły na kole kierownicy).
Pomiaru siły na kole kierownicy dokonuje się w celu określenia:
- wartości luzów w zazębieniu przekładni kierowniczej i w łożyskach wału kierownicy (sprawdza się po odłączeniu mechanizmu zwrotniczego od mechanizmu kierowniczego),
- oporów tarcia w układzie kierowniczym (dla układu kompletnego).
6. Odpowiednia wartość parametrów diagnostycznych określających stan techniczny mechanizmu wspomagającego układu kierowniczego, na przykład: wydatek pompy hydraulicznej, szczelność instalacji hydraulicznej (w przypadku wspomagania hydraulicznego lub elektrohydraulicznego – rys. 7 i 8).
Rys. 7. Przykład układu kierowniczego z hydraulicznym mechanizmem wspomagającym (źródło: TRW)
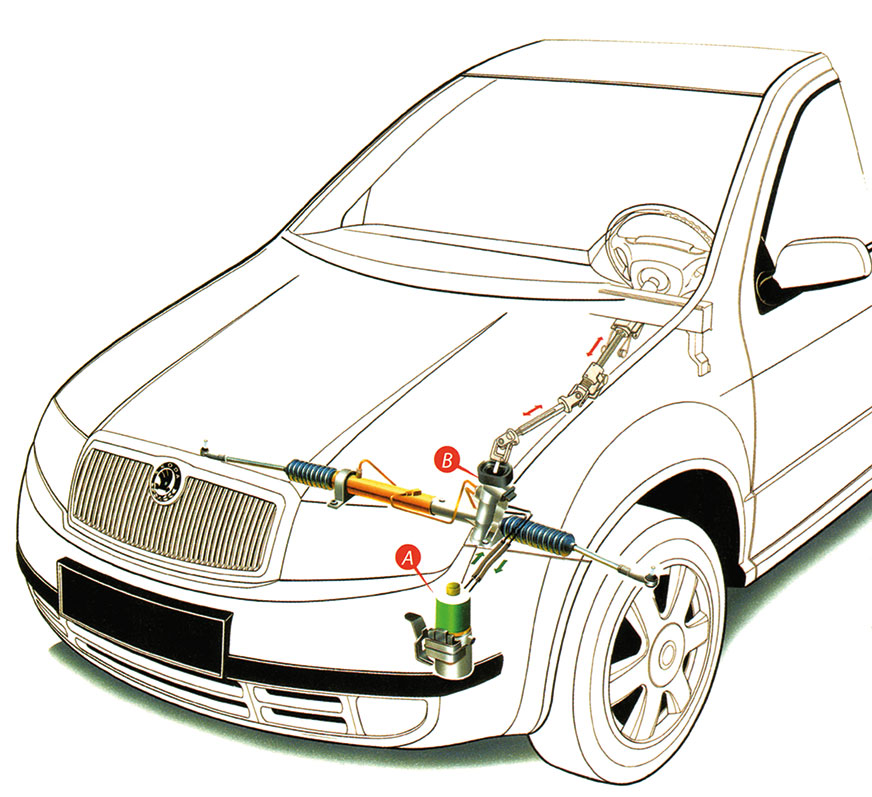
Rys. 8. Układ kierowniczy z elektrohydraulicznym mechanizmem wspomagającym (źródło: Škoda)
A – zespół pompowy (silnik bezszczotkowy, pompa zębata, zbiornik płynu hydraulicznego, elektroniczna jednostka sterująca), B – zawory sterujące i przekładnia zębatkowa układu kierowniczego
5.2 Warunki zdatności technicznej określające geometrię układu kierowniczego/jezdnego
Dalej wymieniono warunki zdatności technicznej określające geometrię układu kierowniczego/jezdnego pojazdu.
1. Odpowiednia wartość parametrów ustawienia kół.
Ustawienie kół przednich samochodu jest określane przez: zbieżność kół (z), kąt pochylenia koła (α), kąt pochylenia sworznia zwrotnicy (β), kąt wyprzedzenia sworznia zwrotnicy (γ). Istotna jest zarówno wartość poszczególnych parametrów ustawienia kół, jak i współzależność pomiędzy nimi. Dlatego należy uwzględnić:
α₁, α₂, Δα
β₁, β₂, Δβ
(α+β)₁, (α+β)₂, Δ(α+β)
γ₁, γ₂, Δγ
z₁, z₂, Δz
gdzie:
– indeksy 1 i 2 dotyczą wartości parametrów ustawienia kół odpowiednio po jednej i drugiej stronie pojazdu,
– Δ oznacza różnicę wartości parametrów ustawienia kół tej samej osi między jedną i drugą stroną pojazdu.
2. Prawidłowa wartość parametrów określających kinematykę skrętu kół kierowanych.
O poprawności kinematyki skrętu kół kierowanych, czyli prawidłowym działaniu trapezu kierowniczego (rys. 9 i 10), decydują:
- kontrolne kąty skrętu kół kierowanych (współzależność kątów skrętu kół),
- maksymalne kąty skrętu kół kierowanych.
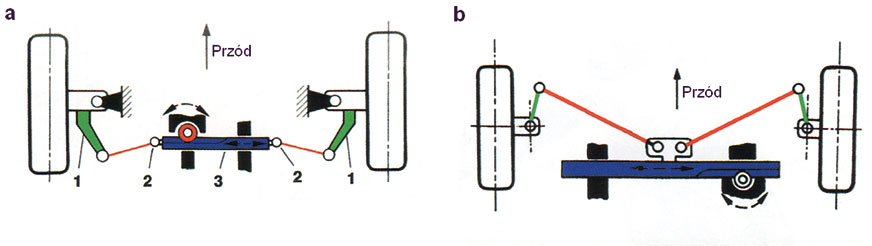
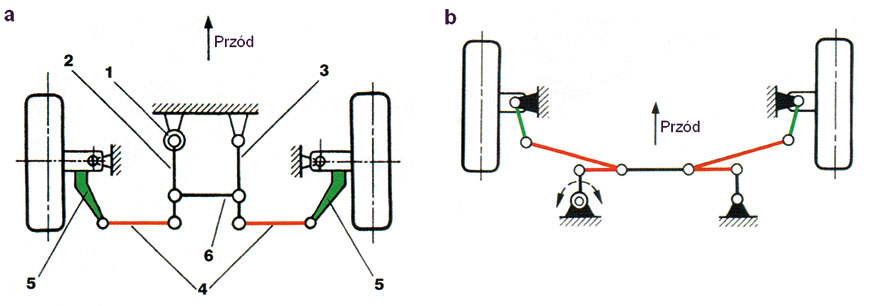
Rys. 9. Schemat układu kierowniczego [2]: a – z trapezem mechanizmu zwrotniczego za osią kół i przekładnią zębatkową, która zapewnia na wyjściu ruch postępowy; b – z przekładnią zębatkową umieszczoną za osią kół i wewnętrznymi przegubami drążków poprzecznych mocowanymi do środka listwy zębatej; 1 – ramiona zwrotnic, 2 – wewnętrzne przeguby drążków poprzecznych, 3 – listwa zębata
Rys. 10. Schemat układu kierowniczego [3]: a – z trapezem współbieżnym umieszczonym za osią kół i przekładnią śrubowo-kulkową, która zapewnia na wyjściu ruch obrotowy; b – z trapezem przeciwbieżnym umieszczonym za osią kół i przekładnią śrubowo-kulkową; 1 – przekładnia kierownicza, 2 – ramię przekładni, 3 – ramię wspornika, 4 – drążki poprzeczne, 5 – ramiona zwrotnic, 6 – drążek środkowy
Współzależność kątów skrętu kół określa się przez kontrolę ustawienia kątowego kół po uprzednim ich skręceniu o określoną wartość w stosunku do położenia wyjściowego (środkowego).
Istotny parametr stanowi również kątowa wartość pełnego skrętu kół kierowanych samochodu. Parametr ten decyduje o zwrotności pojazdu samochodowego, to jest minimalnym promieniu skrętu.
3. Odpowiednia wartość parametrów ustawienia osi jezdnych.
O wartości parametrów ustawienia osi jezdnych pojazdu decydują:
- odchylenie geometrycznej osi jazdy od osi symetrii pojazdu,
- nierównoległość osi kół,
- przesunięcie boczne kół (nieśladowość kół).
Odchylenie geometrycznej osi jazdy od osi symetrii samochodu ocenia się po zmierzeniu kąta zawartego między osią geometryczną i osią symetrii. Oś symetrii pojazdu to linia przebiegająca przez środki osi jezdnych przedniej i tylnej. Geometryczna oś jazdy to prosta (dwusieczna) dzieląca kąt zbieżności całkowitej kół tylnych na dwa równe kąty. Jeżeli osie kół przednich i tylnych są do siebie równoległe i nieprzesunięte oraz zbieżności połówkowe kół tylnych są takie same, to geometryczna oś jazdy pokrywa się z osią symetrii. W przeciwnym przypadku występuje odchylenie geometrycznej osi jazdy od osi symetrii. We współczesnych samochodach osobowych i dostawczych należy wykonywać pomiary ustawienia kół przyrządami czterogłowicowymi (cztery zespoły pomiarowe), umożliwiającymi pomiar względem geometrycznej osi jazdy, to jest osi, wzdłuż której porusza się pojazd. Ma to szczególne znaczenie podczas sprawdzania ustawienia kół samochodów powypadkowych.
Kontrolę nierównoległości osi pojazdu dokonuje się na ogół przez równoczesny pomiar rozstawu osi kół z lewej i prawej strony (różnica rozstawu jest miarą nierównoległości osi).
Nieśladowość kół ocenia się na podstawie wartości poprzecznego przesunięcia kół tylnych w stosunku do kół przednich lub bocznego przestawienia kół względem osi symetrii samochodu.
Podczas diagnozowania układu kierowniczego zakres spełnienia opisowych warunków zdatności technicznej (kompletność, prawidłowość zamocowania, stan zewnętrzny elementów itd.) ocenia się najczęściej organoleptycznie, natomiast do pomiaru wartości parametrów diagnostycznych układu stosowane są metody przyrządowe (urządzenia laserowe, elektroniczne, komputerowe i inne).
Metody diagnozowania układu kierowniczego samochodu zostaną przedstawione w kolejnym numerze „Nowoczesnego Warsztatu”.
Literatura
1. Gabryelewicz M.: Podwozia i nadwozia pojazdów samochodowych (część 2). Układy hamulcowy i kierowniczy, zawieszenie oraz nadwozie. WKŁ, Warszawa 2011.
2. Sitek K.: Diagnozowanie układów kierowniczych (część 1). Poradnik Serwisowy 6/2008.
3. Sitek K.: Diagnostyka samochodowa. Układy odpowiedzialne za bezpieczeństwo jazdy. Wydawnictwo Auto. Warszawa 1999.
dr inż. Kazimierz Sitek




Komentarze (0)