






W poprzedniej części opisano urządzenia do badania układu kierowniczego w warunkach dynamicznych oraz niektóre przyrządy do badania tego układu w warunkach statycznych (przyrządy do diagnozowania wstępnego, przenośne przyrządy do pomiaru kątów). Obecnie zostaną przedstawione urządzenia uniwersalne do badania ustawienia kół jezdnych w pojazdach o dopuszczalnej masie całkowitej do 3,5 t.
1. Przyrządy laserowo-mechaniczne
Mały koszt, prosta obsługa, niska awaryjność i wystarczająca dokładność pomiarowa powodują, że są to obecnie często stosowane urządzenia diagnostyczne. Ich praca może być dodatkowo wspomagana przez niezależnie działający program komputerowy, uzupełniony o komputerową bazę danych wzorcowych parametrów diagnostycznych pojazdów oraz bazę prowadzonych usług. Przykładem urządzenia laserowo-mechanicznego jest GTO Laser produkowany przez Precyzję (rys. 1).


W układzie optycznym przyrządów tej grupy są obecnie wykorzystane lasery półprzewodnikowe. Użyte lasery muszą być w pełni bezpieczne, czyli mieć moc do 1 mW (druga klasa bezpieczeństwa). Zasilanie zespołów pomiarowych takich urządzeń powinno odbywać się bezprzewodowo dzięki zastosowaniu baterii akumulatorów. W tego typu przyrządach kąty poziome (zbieżność kół, nierównoległość osi, odchylenie geometrycznej osi jazdy od osi symetrii) mierzy się w sposób optyczny za pomocą projektora laserowego, a kąty pionowe (kąt pochylenia koła oraz kąty pochylenia i wyprzedzenia osi sworznia zwrotnicy) w sposób mechaniczny – jako wskaźnik wykorzystano poziomnicę, a odczytu dokonuje się na podziałkach umieszczonych na obrotowych pokrętłach. W porównaniu z wcześniejszymi przyrządami optycznymi (żarówkowymi) charakteryzują się większą dokładnością, zwartością konstrukcji, prostym przeprowadzeniem kompensacji bicia obręczy. Układ optyczny zapewnia wyraźniejszy i ostrzejszy obraz. Zespół pomiarowy (projektor) jest wyposażony w dwa lasery. Dzięki temu nawet przy dużym nasłonecznieniu wyraźnie widać plamkę lasera na ekranach. Przyrząd może być zasilany bezprzewodowo (bateriami niklowo-kadmowymi) lub przewodowo (zasilacz 6 V). Urządzenie jest wyposażone w dodatkowe elementy (belka kontrolna, przyrząd do kalibracji luster) umożliwiające sprawdzenie dokładności wskazań. Wyposażenie podstawowe przyrządu GTO Laser firmy Precyzja składa się z: zespołów pomiarowych przednich i tylnych, zacisków mocujących z łapami uniwersalnymi i specjalnymi, obrotnic, płyt rolkowych, szafki lub stanowiska wiszącego, rozpórki pedału hamulca i blokady kierownicy, przyrządu kalibracyjnego wraz z belką kontrolną. Zasadniczym elementem przyrządu GTO Laser jest zespół pomiarowy przedni (rys. 2a). Składa się on z trzech podstawowych podzespołów.


- Korpusu złożonego z płyty uchwytu i wysięgnika. Płyta wyposażona jest w tuleję zaciskową umożliwiającą zamocowanie zespołu pomiarowego na zacisku. Na wysięgniku umieszczona jest poziomnica do ustawienia zespołu pomiarowego w poziomie. W osłonie korpusu zamocowany jest laser symetrii, który wysyła promień na zespół pomiarowy tylny, od którego promień może być odbity i rzutowany na ekran symetrii. W ścianie osłony znajduje się gniazdo zasilające, włącznik zasilania, dioda oznaczająca pracę laserów oraz dioda sygnalizująca rozładowanie baterii akumulatorów. W tylnej części korpusu, na pojemniku akumulatorów, znajduje się dioda sygnalizująca rozpoczęcie procesu szybkiego ładowania akumulatorów po odwieszeniu zespołu pomiarowego na stanowisko odkładcze.
- Mechanizmu kątów pionowych zamocowanego do korpusu za pomocą nakrętki radełkowanej, której poluzowanie umożliwia obrót mechanizmu o kąt 90O. W mechanizmie umieszczone jest pokrętło kompensacji bicia. W obudowie widoczna jest poziomnica, która wraz z pokrętłem kąta pochylenia koła (pokrętło zewnętrzne) oraz pokrętłem kątów osi sworznia zwrotnicy (pokrętło wewnętrzne) służy do pomiaru kątów pionowych.
- Mechanizmu zbieżności zamocowanego na wysięgniku korpusu. W mechanizmie zbieżności umieszczony jest laser zbieżności wysyłający promień na przeciwległy zespół pomiarowy przedni. Promień kierowany jest za pomocą dźwigni tak, aby padał na ekran zbieżności przeciwległego zespołu pomiarowego. Zewnętrzne pokrętło zbieżności służy do przeprowadzania pomiaru kąta zbieżności połówkowej koła. Wewnętrzne pokrętło zbieżności służy do ułatwienia przeprowadzenia regulacji tego parametru. Zespół pomiarowy przedni montuje się na kole za pomocą trzpienia mocującego zacisku blokowanego śrubą.
Natomiast zespół pomiarowy tylny (rys. 2b) składa się z niżej wymienionych części.
- Korpusu zakładanego na trzpień mocujący zacisku i blokowanego śrubą. Do wypoziomowania zespołu pomiarowego służy poziomnica umieszczona na korpusie.
- Mechanizmu kątów pionowych przymocowanego do korpusu. Na obudowie mechanizmu widoczne jest pokrętło kompensacji bicia, a w obudowie poziomnica wykorzystywana wraz z pokrętłem zewnętrznym do pomiaru kąta pochylenia koła. Do pomiaru zbieżności połówkowej koła wykorzystuje się pokrętło wewnętrzne.
- Zespołu lustra przymocowanego do boku mechanizmu kątów pionowych. Zespół lustra wyposażony jest w ekran uchylny, na który rzutowany jest promień laserowy z zespołu pomiarowego przedniego. Po opuszczeniu ekranu uchylnego widać lustro, które można odchylać za pomocą pokrętła kąta pochylenia koła. Promień laserowy po odbiciu od lustra jest rzutowany na ekran symetrii zespołu pomiarowego przedniego.
Wykonywanie pomiarów przyrządem laserowo-mechanicznym jest łatwe i szybkie. Przyrząd nadaje się do kontroli ustawienia kół o średnicach obręczy od 12” do 20”. Jego zaletą jest pomiar zbieżności połówkowej kół przednich względem geometrycznej osi jazdy (z uwzględnieniem nierównoległości osi). Prosta konstrukcja urządzenia umożliwia diagnoście sprawdzenie dokładności wskazań we własnym zakresie po zastosowaniu belki kontrolnej i przyrządu do kalibracji luster.
Wykonywanie badań przyrządem GTO Laser może być wspomagane niezależnie działającym programem komputerowym, zainstalowanym na dowolnym komputerze w stacji diagnostycznej lub warsztacie. Ważnym składnikiem oprogramowania jest możliwość współpracy z bazą danych wzorcowych parametrów pojazdów. Komputerowa baza danych zawiera wymagane wartości parametrów diagnostycznych dla około 30 tysięcy modeli pojazdów i jest ciągle aktualizowana.
Program komputerowy GTO PC umożliwia:
- korzystanie z bazy danych wzorcowych parametrów dotyczących ustawienia kół i osi pojazdów (z możliwością łatwego ich wyszukiwania),
- tworzenie własnej bazy danych wzorcowych parametrów,
- prowadzenie niezbędnych obliczeń podczas pomiarów i porównywanie wartości zmierzonych parametrów z wartościami wzorcowymi,
- uzyskanie informacji o prawidłowym przygotowaniu pojazdu do pomiarów,
- rejestrowanie w pamięci komputera wykonanych usług wraz z dokonanymi regulacjami,
- szybki dostęp do zarejestrowanych usług (na podstawie daty badania lub numeru rejestracyjnego pojazdu),
- korzystanie z samodzielnie utworzonych notatek,
- wydruk danych fabrycznych dotyczących ustawienia kół i osi pojazdu,
- sporządzanie protokołu z wykonanych badań.
2. Przyrządy komputerowe do badania geometrii kół jezdnych
Nowoczesne samochody osobowe rozwijające duże prędkości jazdy wymagają szczególnie precyzyjnego ustawienia kół i osi. Takie warunki pomiaru zapewniają przede wszystkim urządzenia komputerowe, w których konstrukcji zastosowano technikę mikroprocesorową. Urządzenia komputerowe różnią się od przyrządów optyczno-elektronicznych i elektronicznych do kontroli geometrii kół jezdnych możliwościami pomiarowymi, sposobem przesyłania i przetwarzania danych oraz sposobem obsługi. Oprócz bardzo dużej dokładności, obiektywności i szybkości pomiaru przyrządy te charakteryzuje nieporównywalna z innymi systemami pomiarowymi łatwość obsługi. Program komputerowy od początku do końca nadzoruje poprawność wykonywanych czynności, co całkowicie uniemożliwia obsługującemu popełnienie błędów metodycznych podczas pomiaru. Bezpośrednio na ekranie monitora, oprócz wyników pomiaru, pojawiają się porównawczo parametry wzorcowe dla danego pojazdu. Ponadto komputerowa baza danych wykonanych usług jest elektronicznym zapisem wyników badań wszystkich pojazdów, jakie zostały poddane kontroli na stanowisku diagnostycznym.
2.1. Charakterystyczne cechy przyrządów komputerowych
Niżej przedstawiono charakterystyczne cechy przyrządów komputerowych do kontroli geometrii kół i osi jezdnych:
- bardzo duża dokładność i szybkość pomiaru oraz łatwa obsługa urządzenia;
- wynik pomiaru jest zapamiętywany, porównywany z danymi producenta i wyświetlany na ekranie monitora; w razie potrzeby wynik pomiaru można otrzymać w postaci wydruku;
- na monitorze ukazują się równocześnie: symbol graficzny badanego parametru, wartość zmierzona, wartość nominalna oraz ich różnica;
- dzięki wykorzystaniu czterech zespołów pomiarowych zakładanych na obręcze kół można równocześnie mierzyć ustawienie dla obu osi;
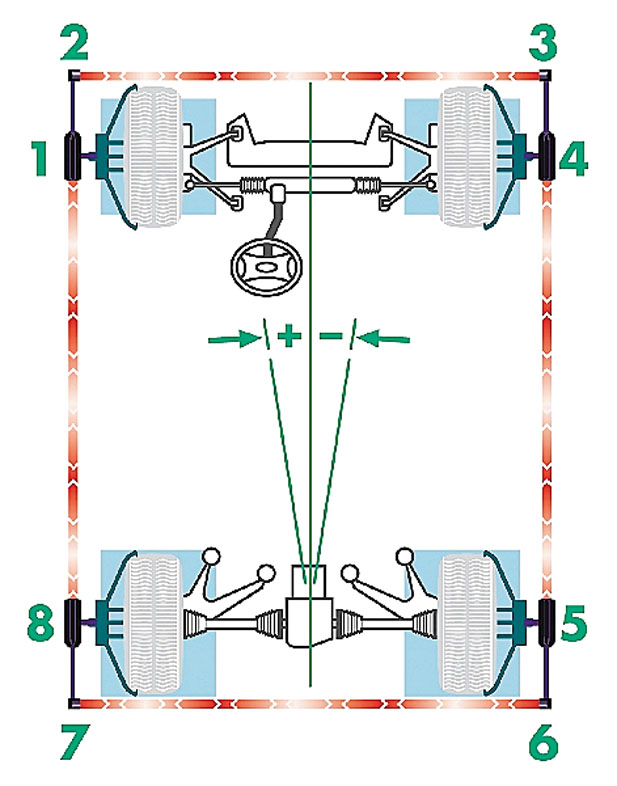
- pomiar ustawienia kół osi przedniej następuje po sprawdzeniu, czy oś geometryczna pojazdu pokrywa się z jego osią symetrii (oś geometryczna stanowi bazę pomiarową); ewentualne odchylenia są pokazywane na monitorze;
- wyniki pomiarów ustawienia koła z jednej strony pojazdu są automatycznie porównywane z wynikami uzyskanymi dla koła z drugiej strony; ewentualna różnica odpowiednich wielkości jest pokazywana na monitorze;
- bicie boczne kół jest kompensowane i automatycznie uwzględniane podczas pomiaru parametrów diagnostycznych;
- jest możliwość współpracy z obrotnicami mechanicznymi i elektronicznymi;
- każde urządzenie wykonuje automatyczny program samotestowania;
- jest możliwość aktualizacji bazy parametrów wzorcowych oraz rozbudowy oprogramowania.
Programy pomiarowe przyrządu komputerowego prowadzą obsługującego przez cały pomiar i umożliwiają jednocześnie kontrolę tylko pojedynczych parametrów. Zarazem urządzenie sprawdza poprawność wykonania wielu czynności. Ewentualne uchybienia są natychmiast wyświetlane na ekranie monitora. Programy regulacyjne stosowane w urządzeniach komputerowych prezentują zbiorcze obrazy wszystkich parametrów danej osi, co umożliwia obserwację zmian parametrów wzajemnie od siebie zależnych. Nowoczesne przyrządy komputerowe umożliwiają również ustawienie kół na pojeździe podniesionym podczas regulowania kątów pochylenia koła oraz wyprzedzenia osi sworznia zwrotnicy. W urządzeniach komputerowych diagnosta może sterować pracą programu bezpośrednio z klawiatury lub zdalnie za pomocą pilota, co w istotny sposób zwiększa wygodę obsługi przyrządu. Grupa urządzeń komputerowych jest zróżnicowana i to zarówno ze względu na cenę, jak i zastosowane rozwiązania konstrukcyjne związane z pomiarem wielkości geometrycznych. Pełne wersje tego rodzaju przyrządów mają cztery zespoły pomiarowe. Umożliwia to pomiar poszczególnych parametrów względem geometrycznej osi jazdy, czyli osi, wzdłuż której rzeczywiście porusza się samochód. Pomiary przyrządem z dwoma zespołami pomiarowymi można przeprowadzać tylko wtedy, kiedy geometryczna oś jazdy pokrywa się z osią symetrii samochodu. Pojazdy o nieznanej przeszłości, zwłaszcza powypadkowe oraz pochodzące z prywatnego importu, powinny być kontrolowane przyrządami z czterema zespołami pomiarowymi.
Najbardziej rozpowszechnione są urządzenia komputerowe, w których zespoły pomiarowe (nazywane także głowicami) są mocowane bezpośrednio do kół jezdnych. Konstrukcja zespołów pomiarowych i sposób posługiwania się nimi zależy od rodzaju zastosowanego nośnika informacji o wzajemnym usytuowaniu kół. W urządzeniach komputerowych rolę nośnika informacji może spełniać elastyczne cięgno lub promień podczerwieni. Przyjmując za kryterium podziału sposób odczytu wielkości geometrycznych potrzebnych komputerowi do wykonania obliczeń parametrów diagnostycznych, wyróżnia się przyrządy: linkowe, z kamerami CCD, z ekranami pasywnymi (3D), z automatycznym przebiegiem pomiaru i rozwiązania mieszane. W przyrządach linkowych zespoły pomiarowe (czujniki rezystancyjne) połączone są ze sobą elastycznymi cięgnami. Znanym w kraju przykładem takiego przyrządu jest GTI Geomaster firmy Precyzja. Wytwórcy stopniowo wycofują się z produkcji tego typu przyrządów. W urządzeniach z kamerami CCD do przekazywania informacji o ustawieniu kół i osi jezdnych wykorzystuje się promień podczerwony wysyłany przez kamerę. Ten rodzaj przyrządu komputerowego jest ciągle doskonalony i występuje obecnie najczęściej. Przykładem przyrządu z kamerami CCD jest GeoTest 60 firmy Precyzja (rys. 3).

Urządzenia 3D (z ekranami pasywnymi) działają w oparciu o analizę zmieniającego się podczas pomiaru obrazu kształtów geometrycznych (trójkątów, kwadratów, kół). Pierwszym producentem tej odmiany przyrządów komputerowych była firma John Bean. Urządzenia te są oferowane od niedawna, jednak ich cena jest stosunkowo wysoka. Kolejny rodzaj urządzeń dokonuje pomiaru w sposób całkowicie automatyczny i bez udziału operatora (na przykład WAB 02 firmy Nussbaum). Stosowany jest przede wszystkim przez wytwórców samochodów na taśmach produkcyjnych. Ostatnia grupa to przyrządy mieszane, które są najczęściej połączeniem urządzeń z kamerami CCD i przyrządów z głowicami pasywnymi (3D). Przykładem takiego urządzenia jest Geoliner 550 prism firmy Hofmann.
2.2. Przyrządy komputerowe wyposażone w kamery CCD
W dalszej części przedstawiono dokładniej urządzenia komputerowe wyposażone w kamery CCD. Pierwsze wersje tych urządzeń były wyposażone standardowo w 6 kamer o zakresie pomiarowym ±130. Takie rozwiązanie nie zapewniało zbyt dużej dokładności pomiaru i było wrażliwe na promieniowanie słoneczne. Obecnie oferuje się urządzenia z kamerami CCD o zakresie pomiarowym powyżej ±200, które są mało wrażliwe na światło słoneczne (nowoczesne kamery trzeciej generacji zapewniają zakres pomiarowy minimum ±230). Każdy zespół pomiarowy wyposażony jest w dwie kamery CCD oraz cztery nadajniki promieniowania podczerwonego (rys. 4). Pierwsza kamera usytuowana jest w obudowie zespołu pomiarowego, a druga umieszczona w wysięgniku. Kamery CCD są oświetlane przez nadajniki podczerwieni umieszczone we współpracujących zespołach pomiarowych. Pasek fotoelementów umieszczony w kamerze jest ustawiony pod kątem 45o w stosunku do obu nadajników podczerwieni. Pasek fotoelementów jest podzielony na leżące obok siebie segmenty. W zależności od producenta liczba segmentów wynosi zwykle 1024, 2048 lub 3648. Na zamocowany w kamerze pasek fotoelementów pada promień podczerwieni. Na podstawie intensywności oświetlenia poszczególnych segmentów obliczane jest odchylenie strumienia światła i tym samym odpowiedni kąt. Dokładność pomiaru zwiększa się wraz ze wzrostem liczby segmentów na pasku fotoelementów. Umieszczony wewnątrz kamery jeden z nadajników oświetla z góry pasek fotoelementów. Ten nadajnik jest zamocowany wahliwie (w zespołach pomiarowych firmy Beissbarth) i służy do pomiaru kątów pochylenia koła oraz ustawienia sworznia zwrotnicy. Dokładność pomiaru zwiększono dzięki zastosowaniu soczewki skupiającej strumień światła oraz układu elektronicznego kamery, która rozpoznaje najjaśniej oświetlone segmenty fotoelementu. Pasek fotoelementów jest umieszczony w czarnej obudowie, przed którą znajduje się druga czarna obudowa w kształcie ściętego ostrosłupa. Dodatkowo przed paskiem fotoelementów i soczewką umieszczona jest przysłona. Taka konstrukcja kamery ogranicza wpływ promieniowania słonecznego na wynik pomiaru.
Ważnym parametrem charakteryzującym urządzenia komputerowe jest liczba zastosowanych czujników położenia, czyli czujników mierzących kąty w płaszczyźnie poziomej (tzn. liczba kamer). Dla przyrządu składającego się z czterech zespołów pomiarowych może ich być sześć lub osiem. Po zastosowaniu ośmiu czujników tylne zespoły pomiarowe nie różnią się wyglądem zewnętrznym od przednich. Podczas pomiaru samochód otoczony jest wiązką promieniowania podczerwonego ze wszystkich stron (rys. 5). Jeżeli czujników jest tylko sześć, to nie ma elementów pomiarowych z tyłu, za pojazdem. Należy podkreślić, że w przypadku ośmiu czujników jest możliwy pomiar większej liczby parametrów diagnostycznych, szczególnie dotyczących ustawienia kół tylnych i osi pojazdu (np. nierównoległości osi kół jezdnych). Niektóre przyrządy komputerowe wyposażone w 8 kamer mogą wykonywać pomiary dodatkowe dotyczące wzajemnego usytuowania elementów zawieszenia pojazdu, co umożliwia ocenę poprawności wykonania naprawy powypadkowej pojazdu.
Istotną cechą zespołów pomiarowych jest sposób przesyłania danych między sobą i komunikowania się z centralną jednostką sterującą (komputerem) oraz sposób ich zasilania. W urządzeniach stosowanych w stacjach kontroli pojazdów można spotkać następujące rodzaje transmisji danych pomiarowych: przewodami, falami radiowymi lub za pomocą promieniowania podczerwonego. Z wymienionych wyżej sposobów w obecnie produkowanych urządzeniach komputerowych stosuje się wyłącznie komunikację za pomocą fal radiowych. W niektórych przyrządach do transmisji danych zastosowano bardzo obciążone pasmo o długości 433 MHz. Takie rozwiązanie ma pewne wady: jest podatne na różne zakłócenia podczas pracy i negatywnie oddziałuje na pracę innych urządzeń (autoalarmy, piloty zdalnego sterowania). Nowocześniejszym i pozbawionym wyżej wymienionych wad rozwiązaniem jest wykorzystanie pasma modułów radiowych (komunikacji Bluetooth).
Zasilanie zespołów pomiarowych i komunikowanie się z jednostką centralną są ze sobą powiązane. Wytwórcy urządzeń stosują obecnie następujące rozwiązania: przewodowe zasilanie i przesyłanie danych do jednostki sterującej lub zasilanie akumulatorowe i radiową komunikację z centralną jednostką sterującą. Zasilanie przewodowe jest tańsze, lecz o wiele mniej wygodne (przewody znajdują się na powierzchni stanowiska). Ze względów użytkowych istotna jest długość przewodów (przewody łączące zespoły pomiarowe – min. 5 m, przewody między zespołami pomiarowymi a jednostką centralną – min. 7 m).
W przypadku zasilania akumulatorowego powinna być możliwa co najmniej 6-godzinna praca zespołów pomiarowych bez konieczności ich doładowywania. Najkorzystniej jest, jeżeli można zawiesić głowice pomiarowe na specjalnym stanowisku odkładczym, gdzie następuje automatyczne sprawdzenie stanu naładowania akumulatorów, po czym rozpoczyna się kontrolowany proces ich doładowywania. Jeżeli zespoły pomiarowe wyposażone są w baterie akumulatorów, które trzeba demontować do ładowania, to ważna jest trwałość i pewność ich mocowania. Dla zapewnienia ciągłości pracy urządzenie powinno wówczas posiadać dwa komplety baterii. Zespoły pomiarowe zasilane bezprzewodowo powinny być wyposażone w sygnalizację rozładowania akumulatorów na kilkanaście minut przed ich wyłączeniem się oraz umożliwiać (w trybie awaryjnym) pracę w systemie przewodowym. Należy również zwrócić uwagę na sposób mocowania zespołów pomiarowych na zacisku i długość wysięgnika, na którym zamocowana jest kamera zbieżności. Mocowanie zespołów pomiarowych powinno być pewne i niezmieniające położenia zespołu. Można to uzyskać, stosując śruby blokujące umieszczone tak, aby nie przecinały osi czopa. Natomiast zastosowanie zbyt krótkiego wysięgnika kamery zbieżności zmusza do częstego używania przedłużaczy podczas wykonywania pomiaru.

W dalszej części przedstawiono cechy oprogramowania użytkowego urządzeń komputerowych, które świadczą o nowoczesnej konstrukcji przyrządu i są istotne dla pracy diagnosty. Według firmy Precyzja do istotnych cech charakteryzujących oprogramowanie użytkowe wykorzystywane w urządzeniach komputerowych należą:
- rodzaj systemu operacyjnego zastosowanego w komputerze,
- intuicyjność programu użytkowego,
- czytelność wizualizacji procedur pomiarowych i regulacyjnych,
- występowanie elementów graficznych zwiększających komfort pracy diagnosty,
- zawartość bazy wzorcowej pojazdów,
- sposób przeprowadzania kompensacji bicia kół,
- wskazywanie dopuszczalnej wartości różnicy kątów wyprzedzenia osi sworznia zwrotnicy dla koła lewego i prawego oraz możliwość obserwacji zmian wyprzedzenia osi zwrotnicy podczas regulacji,
- możliwość prowadzenia bazy klientów i wykonanych usług,
- dostępność programu pomiarowego dla samochodów ze spojlerami.
W zależności od producenta w przyrządach komputerowych stosowane są różne systemy operacyjne. W praktyce najkorzystniejszym rozwiązaniem jest zastosowanie najnowszej wersji systemu operacyjnego Windows. Ważną cechą programu użytkowego jest intuicyjność jego obsługiwania. Dlatego przed zakupem należy zapoznać się przynajmniej z wersją demonstracyjną programu. Istotna jest również treść instrukcji obsługi urządzenia (dokumentacji techniczno-ruchowej), która powinna umożliwić przeprowadzenie pomiarów bez konieczności uczestniczenia w dodatkowych szkoleniach z obsługi. Urządzenia komputerowe umożliwiają wykonanie pomiarów ustawienia kół i osi jezdnych na dwa sposoby. Pierwszy z nich to pomiar całkowicie automatyczny. Diagnosta powinien wykonywać polecenia wyświetlane na ekranie monitora. Szczególnie ważna jest czytelność wizualizacji procedur pomiarowych. Drugi sposób sprowadza się do pomiaru parametrów diagnostycznych w cyklu indywidualnym. Wówczas diagnosta decyduje o rodzaju i kolejności pomiaru. Elementy graficzne programu obsługowego ułatwiają prowadzenie pomiaru, zwiększają czytelność wyświetlanych obrazów i komfort pracy diagnosty. Do takich elementów graficznych należy zmiana koloru wyświetlanego parametru w zależności od jego poprawności. Oprócz tego najczęściej stosuje się:
- wskaźnik liniowy wartości mierzonego kąta,
- wskaźnik liniowy różnicy między wartościami kątów dla lewego i prawego koła,
- wskaźnik skrętu kół,
- kontrola wypoziomowania zespołów pomiarowych.
Wskaźnik liniowy stanowi interpretację graficzną prawidłowej wartości kąta. Diagnosta nie musi porównywać wartości rzeczywistych parametrów z wymaganymi. Dzięki temu wskaźnikowi może określić, w którym miejscu pola tolerancji znajduje się wartość mierzonego kąta. Jest to szczególnie przydatne podczas regulacji poszczególnych kątów. Wskaźnik liniowy różnicy między wartościami kątów dla lewego i prawego koła w sposób graficzny pokazuje różnicę między stronami samochodu w stosunku do wartości dopuszczalnej. Stosuje się go dla kątów pochylenia kół oraz dla kątów wyprzedzenia osi sworzni zwrotnic.
Wskaźnik skrętu kół ułatwia ustawienie kół do jazdy na wprost oraz skręcenie kół o wymagany kąt podczas wykonywania pomiarów dynamicznych. Umożliwia to dokładne ustawienie kół jezdnych w określonym położeniu. Natomiast kontrola wypoziomowania zespołów pomiarowych jest wykonywana w określonych punktach procedury pomiarowej i podczas regulacji. Uniemożliwia to wykonywanie pomiarów, jeżeli zespoły pomiarowe są niewypoziomowane. Sterowanie programem użytkowym powinno być możliwe na kilka sposobów: myszą komputerową, za pomocą przycisków klawiatury, pilotem zdalnego sterowania oraz przyciskami umieszczonymi na zespołach pomiarowych (dot. szczególnie czynności związanych z kompensacją kół).

Przed zakupem przyrządu komputerowego należy zapoznać się z zawartością bazy wzorcowej pojazdów, która umożliwia (po wybraniu modelu pojazdu) automatyczne porównanie wartości mierzonej parametru diagnostycznego z wartością wymaganą, ustaloną przez producenta pojazdu. Zawartość bazy parametrów wzorcowych nie może być nadmiernie zubożona. Istotne jest, aby baza parametrów wzorcowych:
- była dostępna w cenie podstawowej przyrządu,
- mogła być aktualizowana w akceptowalnych terminach i za przystępną cenę,
- pozwalała użytkownikowi na dopisywanie parametrów nowych pojazdów,
- zawierała informację o konieczności obciążenia pojazdu podczas pomiarów (jeżeli producent określa takie wymaganie),
- zawierała różne wartości kątów uzależnione od parametrów dodatkowych, zwykle związanych ze stanem tylnego zawieszenia, jeżeli taki jest wymóg producenta pojazdu (przydatne są rysunki parametrów dodatkowych i automatyczny dobór wartości kątów po określeniu parametrów dodatkowych).
Jedną z istotnych cech programów użytkowych przyrządów komputerowych jest sposób przeprowadzania kompensacji bicia koła. Jest to operacja czasochłonna i uciążliwa. W praktyce stosuje się dwa rodzaje kompensacji bicia koła: przy podniesionym pojeździe lub przez przetaczanie. Wszystkie przyrządy z kamerami CCD umożliwiają wykonanie kompensacji przy uniesionych osiach pojazdu. Niektóre urządzenia umożliwiają dodatkowo przeprowadzenie kompensacji bicia koła przez przetaczanie. Kompensacja przez przetaczanie znacznie upraszcza i skraca cały proces pomiarowy geometrii kół. Wykorzystywana jest szczególnie w odmianach radiowych przyrządów. W wersjach przewodowych urządzeń ten sposób kompensacji jest niekiedy trudny do wykonania (ciężar przewodów podczas wychylenia zespołów pomiarowych może wywołać polecenie programu o powtórzeniu czynności). Dokładność obu metod kompensacji bicia koła jest porównywalna. Program powinien również umożliwiać wykonanie kompensacji bicia jednego koła bez konieczności wykonywania tej czynności dla wszystkich kół (istotne po regulacji poprzedzonej demontażem koła). Wartość bicia każdego koła w płaszczyznach pionowej i poziomej powinna być wyświetlana z jednoczesną sygnalizacją nadmiernych wartości. Wskazanie konkretnego koła i płaszczyzny, w której występuje zbyt duże bicie, umożliwia diagnoście poprawienie zamocowania zacisku lub zamocowanie zacisku w innym miejscu obręczy. Takie działanie zwiększa dokładność pomiaru kątów ustawienia kół jezdnych.

Nowe wersje przyrządów komputerowych z kamerami CCD zawierają programy pomiarowe dla samochodów ze spojlerami. W przypadku zabudowanego podwozia, gdy przerwana jest transmisja sygnału między współpracującymi kamerami, uruchamiany jest automatycznie pomiar 6-czujnikowy (nie trzeba zmieniać położenia zespołów pomiarowych). Podejmując decyzję o zakupie nowego urządzenia, należy szczegółowo zapoznać się z wykazem wyposażenia podstawowego i dodatkowego przyrządu. Zbyt ubogie wyposażenie podstawowe często uniemożliwia wykonanie pomiaru i zmusza klienta do zakupu elementów wyposażenia dodatkowego. Ważnymi elementami składowymi urządzenia do pomiaru ustawienia kół i osi (decydującymi o możliwości wykonania pomiaru, ergonomii i dokładności wskazań) są zaciski mocujące i obrotnice. Zespoły pomiarowe mocuje się na obręczach kół za pomocą zacisków mocujących. Dla zacisków mocujących istotne są: jakość wykonania, zakres średnic obręczy (na których można zacisk zamocować), kształt stopek mocujących oraz możliwość ich zamocowania na wszystkich typach obręczy kół (obręcze stalowe, aluminiowe, typu softline, koła typu PAX). Wytwórcy oferują niżej wymienione rodzaje zacisków:
- uniwersalne – cztery punkty styku z obręczą, śruba dwustronna z pokrętłem do ustawienia rozstawu (rys. 6),
- szybkomocujące, uniwersalne, nadające się do wszystkich rodzajów obręczy – zacisk jest dociskany do obręczy przez napięcie ramion zaciskających na bieżniku opony (rys. 7),
- szybkomocujące, specjalne do określonych typów pojazdów.
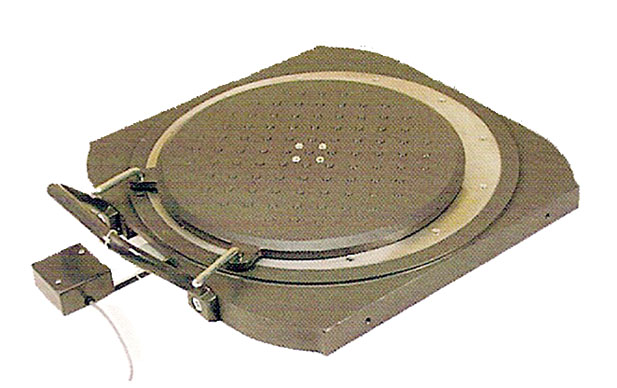
Dwa pierwsze rodzaje zacisków wymagają przeprowadzenia kompensacji bicia układu koło-zacisk. W przypadku zacisków szybkomocujących, specjalnych nie trzeba wykonywać kompensacji bicia koła (elementy tych zacisków przechodzą przez otwory w obręczy koła i bazują na technologicznych otworach ustalających). Z urządzeniami komputerowymi mogą współpracować zarówno obrotnice mechaniczne, jak i elektroniczne. Obrotnice elektroniczne (rys. 8a) umożliwiają bezpośredni pomiar kątów skrętu kół i różnicy między nimi. W przypadku obrotnic mechanicznych diagnosta wymienione parametry odczytuje ze skali i wprowadza ręcznie za pomocą klawiatury do komputera. Dla obrotnic mechanicznych istotne jest, aby podczas pomiaru kątów osi sworzni zwrotnic wykonywanie skrętów było nadzorowane przez program komputerowy (ułatwienie pomiaru). W celu zniwelowania wpływu wysokości obrotnic na dokładność pomiarów pod koła tylne pojazdu podstawia się płyty wyrównawcze (rolkowe). Zastosowanie znalazły trzy rodzaje płyt rolkowych: zwykłe, długie i przesuwno-skrętne (rys. 8b).
dr inż. Kazimierz Sitek




Komentarze (0)