




Napęd AWD przekłada się na lepszą przyczepność, niezbędną w firmach działających w trudniejszych warunkach drogowych, poruszających się po oblodzonych drogach w krajach skandynawskich i alpejskich, żwirowych szlakach w regionach górskich lub po błotnistych placach budowy w całej Europie. Ale jak to działa, gdy pojazd ma niezależne elektryczne jednostki napędowe?
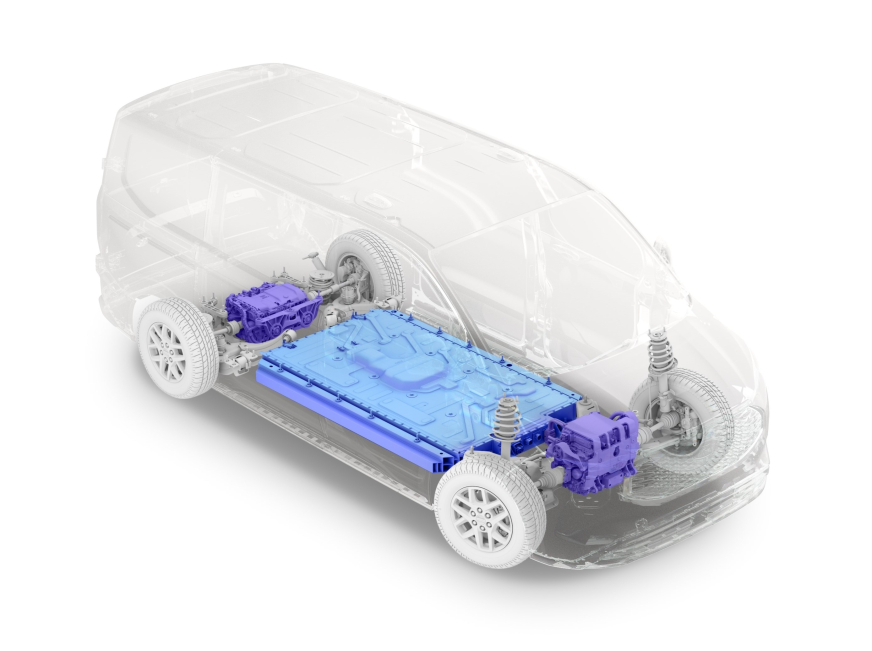
Za przykład weźmy uzytkowy model pojazdu. Nowy system AWD, stworzony dla E‑Transita Customa, opiera się na istniejącym układzie napędu na tylne koła (RWD), do którego dodano niezależną, elektryczną jednostkę napędową o dużej mocy dla kół przednich. Każda jednostka napędowa może niezależnie dostarczać pełną moc maksymalną, dzięki czemu pojazd charakteryzuje się zwiększoną elastycznością i kontrolą.
Kluczowa jest inteligencja systemu. „System nieustannie monitoruje aktualną przyczepność, oceniając uślizg kół nawet 50 razy na sekundę i dokonując korekt w czasie rzeczywistym poprzez zmianę momentu obrotowego, przekazywanego na przednie i tylne koła” - mówi Andy Fells, główny inżynier programu modernizacji modelu E‑Transit Custom.
Inaczej niż 4x4
W przeciwieństwie do konwencjonalnych mechanicznych układów napędu na wszystkie koła, w których moment obrotowy na obie osie dostarczany jest z jednego silnika przez wspólny mechanizm różnicowy, w prezentowanym rozwiązaniu mamy dwie zupełnie niezależne elektryczne jednostki napędowe. Oznacza to na przykład, że w wypadku utraty przyczepności przez tylne koła, przednia jednostka napędowa może przekazać pełen moment obrotowy na koła przednie, aby to zrekompensować.
AWD w praktyce
Dwa elektryczne zespoły napędowe E‑Transita Custom współpracują z zaawansowanymi systemami kontroli trakcji i elektronicznej kontroli stabilności nie tylko rozdzielając moc między przednią i tylną oś, ale także przyhamowując poszczególne koła. Pomaga to uzyskać najlepszą trakcję, zmieniając dystrybucję nie tylko między przednią i tylną osią, ale również między lewą i prawą stroną wtedy, kiedy samochód wjeżdża na odcinki o różnej przyczepności. System stale monitoruje ruchy kierownicą i może wykorzystywać tzw. „fuzzy logic” (logika rozmyta lub logika nieostra) do regulacji momentu obrotowego i hamowania, aby zapobiec zjechaniu samochodu z kursu, niezależnie od tego, czy jedzie on po mokrej autostradzie, czy po sypkiej nawierzchni po nieutwardzonej drodze.
Możliwość pełnego rozdzielenia momentu obrotowego między przednie i tylne koła pozwala również E‑Transitowi Custom AWD pokonywać zakręty z większą stabilnością, gdyż stanowi bardzo skuteczny sposób na ograniczenie nadsterowności lub podsterowności.
Zastosowanie dwóch elektrycznych jednostek napędowych zamiast jednej może też przynieść korzyści w zakresie efektywności energetycznej. System napędu na cztery koła jest tak skonfigurowany, aby podczas jazdy z mniejszą prędkością, np. na trasach dostaw w mieście, poprawić efektywność zwiększając odzyskiwanie energii poprzez hamowanie regeneracyjne obu silników aż o 50% w stosunku do modelu z napędem na tylne koła, dysponującym pojedynczym systemem hamowania regeneracyjnego.
Wyczerpujące testy
Nowy system został przetestowany na trudnym torze testowym Forda w Lommel w Belgii, na nawierzchniach od gładkiego asfaltu po luźny żwir; poddany ekstremalnym temperaturom w komorze testowej Forda w Kolonii w Niemczech oraz przetestowany w realnych warunkach w Finlandii, Szwecji i we włoskich Alpach. Testy E‑Transita Custom AWD pozwoliły na precyzyjne dostrojenie parametrów pracy trybów jazdy, w tym trybu Slippery (Śliskie Nawierzchnie) i Trail (Sypkie nawierzchnie).
Tryb Slippery wykorzystuje system napędu na cztery koła, aby ograniczyć poślizg kół do minimum na mokrych, oblodzonych i błotnistych nawierzchniach, utrzymując prędkość i zwiększając pewność prowadzenia. Tryb Trail jest przeznaczony do pokonywania najtrudniejszych nawierzchni, takich jak żwir lub pokryty piaskiem asfalt, poprzez umożliwienie większego poślizgu kół. Może się to wydawać niezgodne z logiką, ale to „kontrolowane poślizgi” pomagają osiągać bardziej przewidywalne i stabilne postępy na bardzo luźnych nawierzchniach – coś, czego inżynierowie Forda nauczyli się dzięki dziesiątkom lat doświadczeń z pojazdami terenowymi, takimi jak Ranger i Bronco.
Fot. Ford







Komentarze (0)