





Układ kierowniczy ma bezpośredni wpływ na bezpieczeństwo jazdy i uczestnictwa w ruchu drogowym. Jego zadaniem jest zmiana kierunku jazdy zgodnie z wolą kierującego. Prawidłowo działający układ kierowniczy powinien zapewnić utrzymywanie kierunku w trakcie jazdy na wprost, toczenie się kół kierowanych bez poślizgu przy skręcie oraz samoczynne ich powracanie do pozycji odpowiadającej jeździe na wprost po pokonanym zakręcie.
Wymagania te są możliwe do spełnienia poprzez nadanie konstrukcyjnie poszczególnym elementom układu kierowniczego odpowiednich parametrów określanych mianem „geometrii ustawienia kół i osi pojazdów”. Pod pojęciem geometrii kół należy rozumieć również ogół zjawisk zachodzących w trakcie przemieszczania się kół, wynikających z warunków pracy zawieszenia i układu kierowniczego. Na konstrukcję układu kierowniczego pojazdów samochodowych istotny wpływ ma elastokinematyka opisująca ogół procesów związanych ze zmianą ustawienia kół wywołanych siłami i momentami odziaływującymi pomiędzy oponą a nawierzchnią drogi oraz przemieszczaniem wzdłużnym kół przeciwdziałającym kinematycznym zmianom ich ustawienia.
Konstrukcje układów kierowniczych pojazdów samochodowych określają wymagane wartości kątów ustawienia kół wraz z dopuszczalnymi odchyłkami od tych wartości, zapewniające odpowiednie właściwości ruchowe, zdolność utrzymywania prostoliniowego kierunku jazdy oraz przeciwdziałania nadmiernemu zużywaniu się opon. Wymagania te dotyczą kół przednich wszystkich pojazdów oraz kół tylnych w przypadku pojazdów, w których tylnym zawieszeniem nie jest oś sztywna.
Wśród wszystkich parametrów ustawienia kół wyróżnić można wielkości regulowane, a także nieregulowane, nadane konstrukcyjnie w trakcie konstruowania pojazdu. Do wielkości regulowanych zaliczyć trzeba: zbieżność, kąt pochylenia koła i kąt wyprzedzenia osi obrotu zwrotnicy. Wśród wielkości nieregulowanych są z kolei: kąt pochylenia osi zwrotnicy, promień zataczania, przesunięcie osi zwrotnicy względem osi koła oraz różnica kątów skrętu koła wewnętrznego i zewnętrznego.
Wszystkie parametry geometrii kół zarówno z pierwszej, jak i z drugiej grupy muszą być sprawdzane podczas okresowych badań kontrolnych pod kątem prawidłowych wartości poszczególnych wielkości ze względu na bezpieczeństwo ruchu drogowego. Nieprawidłowe wartości (niemieszczące się w granicach tolerancji odchyłek) pierwszej grupy parametrów wynikają przede wszystkim z warunków eksploatacyjnych pojazdu, jak również ze źle przeprowadzonych czynności naprawczych i regulacyjnych. Niemieszczące się w granicach tolerancji dopuszczalnych odchyłek wartości drugiej grupy parametrów wynikają najczęściej ze znacznego okresu eksploatacji pojazdu i jego złego ogólnego stanu technicznego, ale przede wszystkim dotyczą pojazdów powypadkowych, w których nastąpiło trwałe odkształcenie elementów odpowiedzialnych za utrzymanie nadanych konstrukcyjnie wielkości osadzenia i mocowania elementów zawieszenia.
Podstawowe wielkości charakteryzujące geometrię kół i osi pojazdów
- Rozstaw osi – odległość od środka osi przedniej do środka osi tylnej. Większy rozstaw osi zapewnia większą przestrzeń kabiny. Mniejszy rozstaw osi zwiększa z kolei zwrotność pojazdu. Zwykle rozstaw osi w przypadku samochodów osobowych mieści się w granicach 2160-3040 mm.
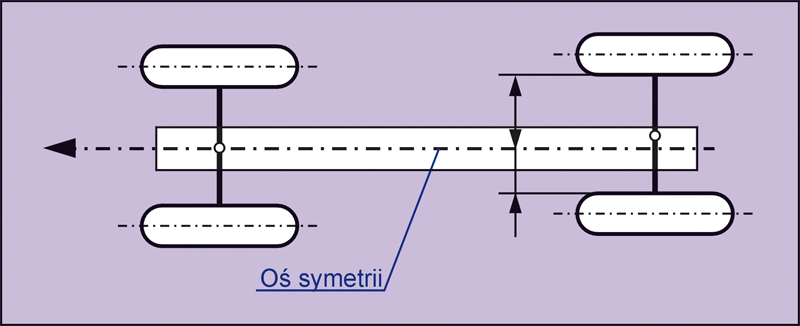
- Rozstaw kół – odległość pomiędzy środkami kół danej osi. Zalecany jest jak największy w stosunku do szerokości pojazdu. Rozstaw kół samochodów osobowych wynosi 1210-1600 mm.
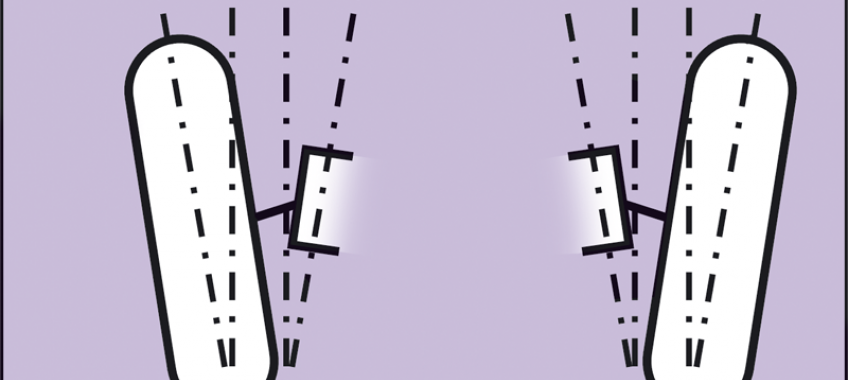
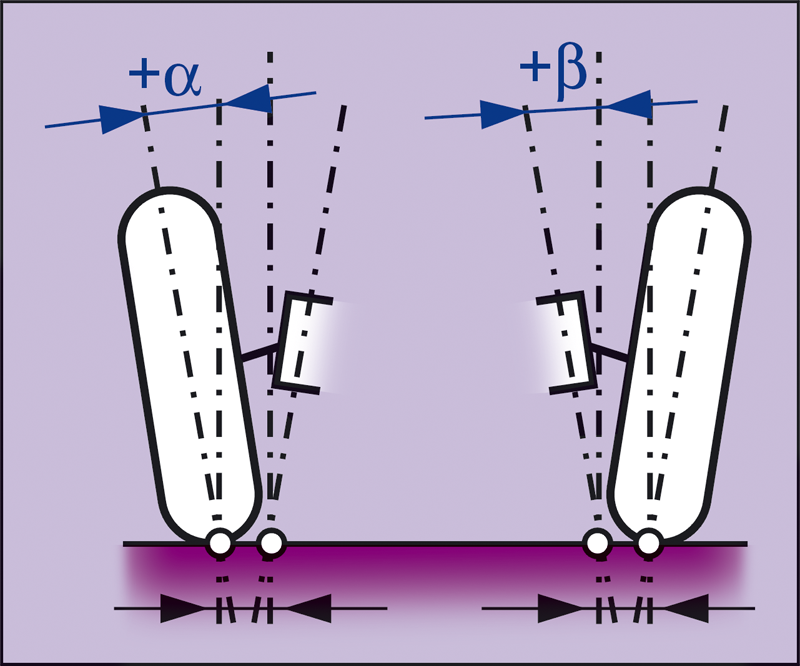
- Kąt pochylenia koła α – kąt zawarty pomiędzy płaszczyznami symetrii koła a płaszczyzną prostopadłą do powierzchni drogi przy kołach ustawionych symetrycznie względem wzdłużnej płaszczyzny symetrii pojazdu. Przyjmuje wartość dodatnią w przypadku, gdy koło pochylone jest na zewnątrz, a ujemną, gdy pochylenie jest do wewnątrz. W celu zapewnienia lepszych własności prowadzących opon przy pokonywaniu zakrętów przewiduje się dla samochodów nieobciążonych ujemne wartości kątów pochylenia kół, w zakresie od 00 do 1020’. Poza wartością nominalną kąta pochylenia koła bardzo ważne jest również określenie jego tolerancji, czyli dopuszczalnych odchyłek od zalecanych wartości oraz dopuszczalnej różnicy pomiędzy kątami pochylenia koła prawego i lewego. Przyjmuje się w praktyce odchyłki ±30’, a różnica kątów pochylenia kół nie powinna przekraczać 30’. W praktyce w konkretnych warunkach jazdy dochodzi do dodatkowych zmian kątów pochylenia, wynikających z kinematyki, przechyłów poprzecznych w trakcie pokonywania zakrętu i elastyczności zawieszenia.
- Kąt pochylenia osi zwrotnicy β – kąt zawarty pomiędzy rzutem osi zwrotnicy na pionową płaszczyznę prostopadłą do wzdłużnej płaszczyzny symetrii pojazdu a prostą pionową leżącą na tej samej płaszczyźnie. Wartość tego kąta mieści się w granicach 110 do 15030’.
- Promień zataczania koła – odległość pomiędzy punktem przecięcia się osi zwrotnicy z płaszczyzną jezdni i linią przecięcia się środkowej płaszczyzny koła z płaszczyzną jezdni. Wartość promienia zataczania koła mieści się w granicach od 18 do +20 mm. Do osiągnięcia małego lub ujemnego promienia zataczania konieczne jest stosowanie większych kątów pochylenia osi zwrotnicy.
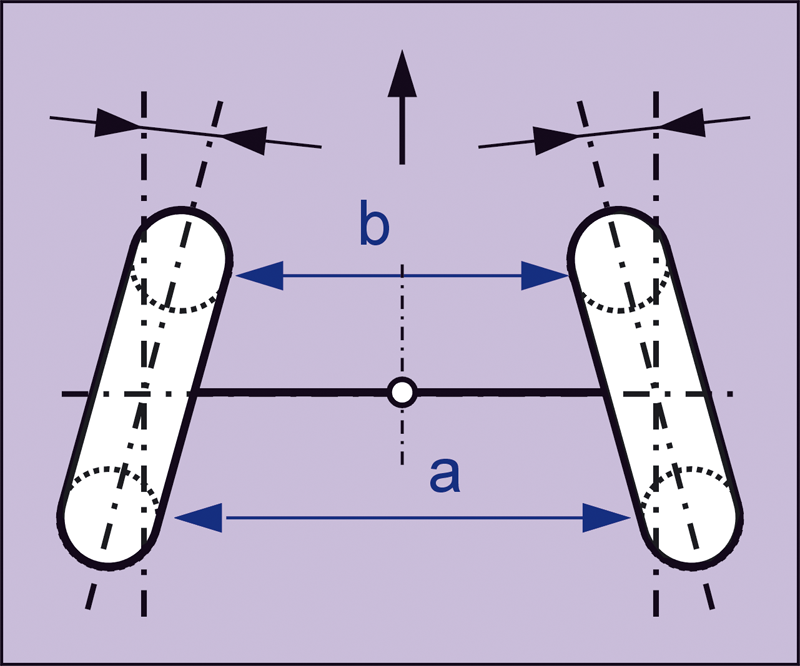
- Zbieżność – różnica odległości pomiędzy krawędziami obrzeży obręczy kół tej samej osi mierzona z przodu (b) i z tyłu (a) w płaszczyźnie równoległej do płaszczyzny jezdni i przechodzącej przez środek kół ustawionych do jazdy na wprost. Wartość zbieżności jest dodatnia (+), gdy a>b, a ujemna (-), kiedy b>a. Zbieżność ujemna określana jest mianem „rozbieżności”. Kąt zbieżności koła jezdnego to kąt zawarty pomiędzy środkową płaszczyzną koła jezdnego a płaszczyzną pionową równoległą do wzdłużnej płaszczyzny symetrii pojazdu przy kołach ustawionych do jazdy na wprost. W przypadku, gdy zbieżność koła lewego i prawego są sobie równe, to taki kąt nazywany jest kątem połówkowym zbieżności. Suma kątów zbieżności koła lewego i prawego jest zbieżnością całkowitą wyrażoną w mierze kątowej. Poza wartością nominalną zbieżności określana jest również jej tolerancja, wynosząca ±5’ na koło. Zbieżność dla kół przednich regulowana jest poprzez zmianę długości drążka poprzecznego. Średnie wartości zbieżności wynoszą dla pojazdów z przednim napędem 0±10’, a dla pojazdów z napędem tylnym +15’±10’. W przypadku kół tylnych regulacja zbieżności możliwa jest w zawieszeniu z wahaczami skośnymi poprzez regulację osi obrotu wahaczy, a w zawieszeniu z podwójnymi wahaczami poprzecznymi poprzez zmianę długości jednego z drążków. Kąt zbieżności kół tylnych samochodów osobowych wynosi od 10’ do 20’.
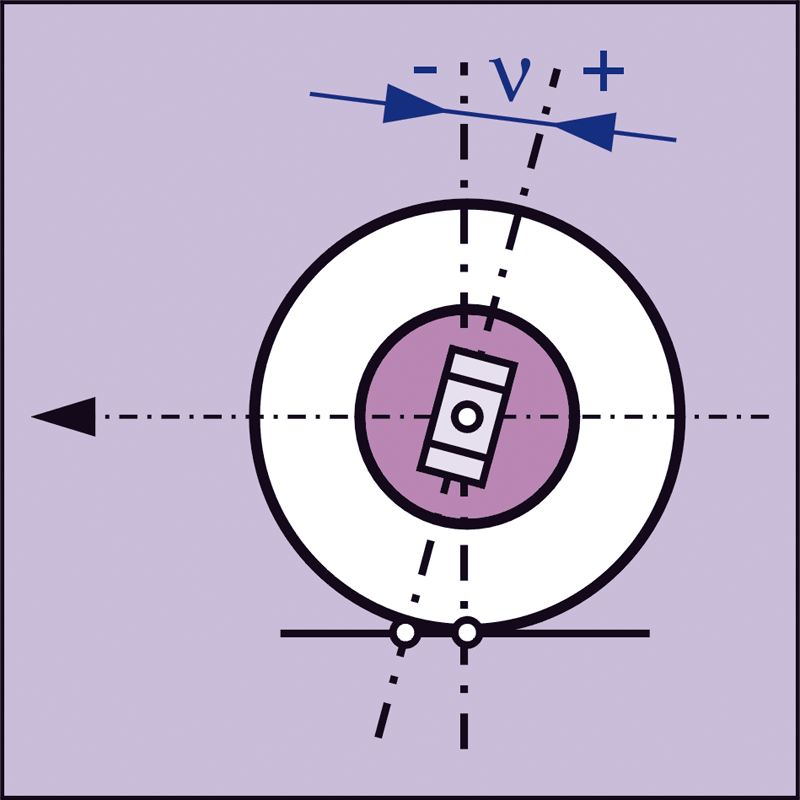
- Kąt wyprzedzenia osi zwrotnicy φ – kąt pomiędzy rzutami osi sworznia zwrotnicy i osi pionowej koła jezdnego na wzdłużną płaszczyznę symetrii pojazdu.
- Wyprzedzenie osi zwrotnicy – odległość między rzutami na płaszczyznę pionową równoległą do płaszczyzny wzdłużnej symetrii pojazdu punktów: przecięcia osi zwrotnicy z płaszczyzną jezdni i punktu przecięcia osi pionowej koła jezdnego z płaszczyzną jezdni. Parametr ten w większości konstrukcji układów kierowniczych ma wartość dodatnią, z wyjątkiem niektórych pojazdów z przednim napędem, w których stosowana jest ujemna wartość.
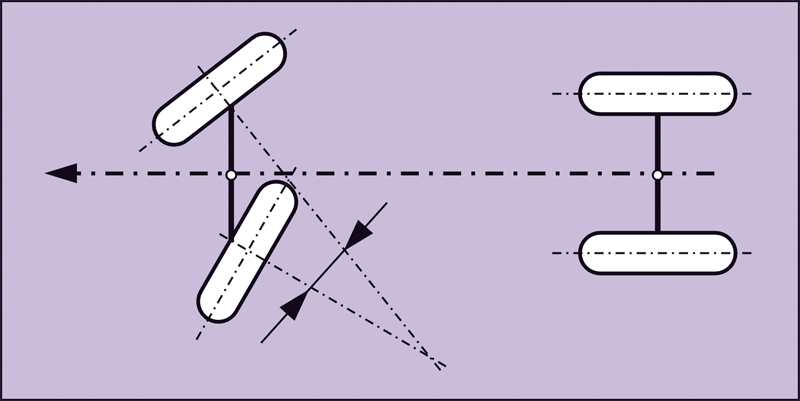
- Maksymalny kąt skrętu koła jezdnego – kąt zawarty pomiędzy rzutem osi symetrii pojazdu i krawędzią przecięcia się środkowej płaszczyzny koła z nawierzchnią drogi. W konstrukcjach pojazdów z nieskrętnymi kołami tylnymi kąty skrętu przedniego koła wewnętrznego i zewnętrznego muszą być różne. Kąt skrętu koła wewnętrznego musi być większy od kąta skrętu koła zewnętrznego.
- Różnica kątów skrętu kół – różnica kątów pomiędzy kołami przednimi a osią symetrii pojazdu przy skręcie jednego z tych kół o 200. Różnica kątów skrętu musi mieć zawsze wartość dodatnią.
Przy kontroli i pomiarze geometrii ustawienia kół i osi pojazdów istotne są jeszcze inne parametry, do których zaliczyć trzeba:
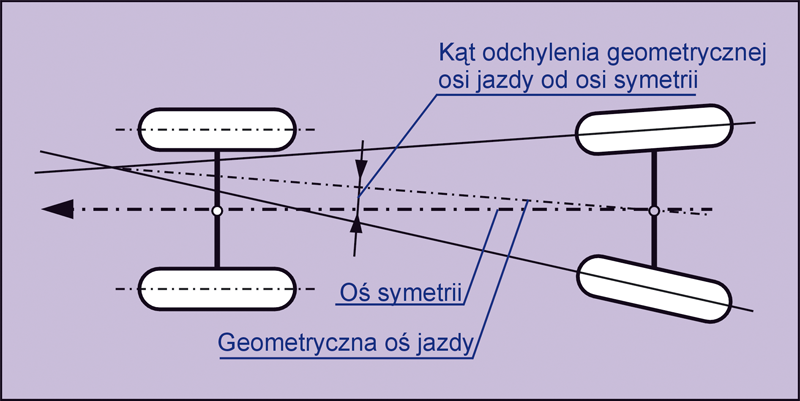
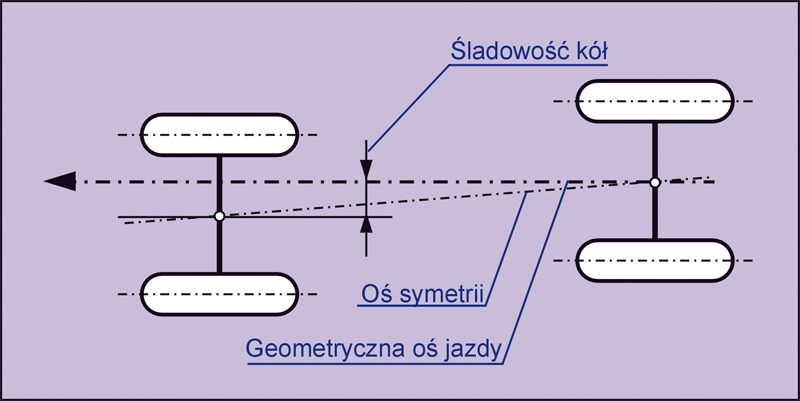
- oś symetrii pojazdu – linia prosta łącząca środki osi przedniej i tylnej pojazdu;
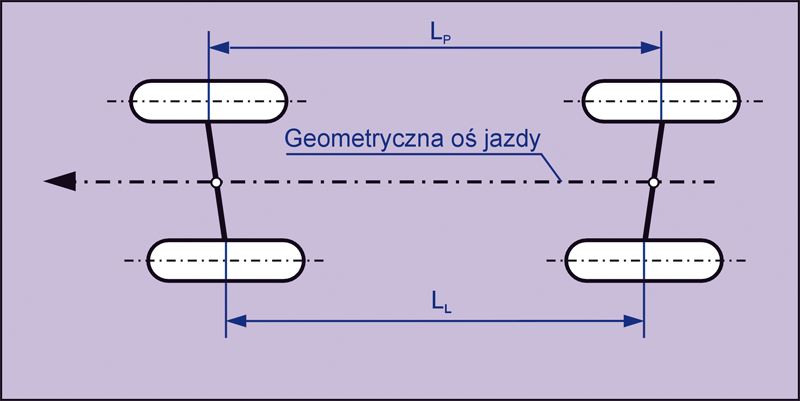
- geometryczna oś jazdy – dwusieczna kąta zbieżności całkowitej kół tylnych;
- odchylenie geometrycznej osi jazdy od osi symetrii – kąt zawarty pomiędzy geometryczną osią jazdy a osią symetrii pojazdu; kąt ma wartość dodatnią (+), jeśli geometryczna oś jazdy odchylona jest w lewo od osi symetrii pojazdu, a ujemny (-), jeśli oś jazdy jest odchylona w prawo;
- nierównoległość osi (różnica rozstawu osi) – różnica między rozstawem osi kół z lewej strony pojazdu (Ll) i rozstawem osi kół z prawej strony pojazdu (Lp);
- śladowość kół (symetryczność ustawienia kół pomiędzy stroną lewą i prawą) – przesunięcie boczne kół osi pojazdu względem osi symetrii pojazdu wynikająca z kąta odchylenia geometrycznej osi jazdy od osi symetrii.
Wszystkie nadane konstrukcyjnie przez producenta pojazdów wielkości poszczególnych parametrów geometrii ustawienia kół i osi muszą być utrzymywane w trakcie całego okresu eksploatacji pojazdu. Mogą one nieco odbiegać od wartości fabrycznych, co jest wynikiem eksploatacji pojazdu i powstających w układach kierowniczym i zawieszenia luzów, lecz muszą się mieścić w dopuszczalnych dla poszczególnych wielkości wartościach odchyłek.
W celu spełnienia tych wymagań pojazdy muszą być poddawane cyklicznie okresowym badaniom technicznym prowadzonym przede wszystkim na stacjach kontroli pojazdów. Pomiar geometrii ustawienia kół musi być ponadto wykonywany każdorazowo po wymianie elementów układu kierowniczego, przeprowadzanych naprawach powypadkowych, a także w przypadku pojawiających się niepokojących objawów świadczących o nieprawidłowym ustawieniu układu kierowniczego (np. nierównomiernego zużywania się opon czy problemów z utrzymaniem prostoliniowego kierunku jazdy).
mgr Andrzej Kowalewski




Komentarze (8)