





Siły działające na samochód
Gdy samochód porusza się po łuku, siły boczne pomiędzy oponami a nawierzchnią drogi decydują o jego tzw. nadsterownym, podsterownym lub neutralnym zachowaniu. Dzięki nim pojazd zachowuje sterowność lub stateczność. Suma wszystkich sił bocznych równoważy siłę odśrodkową.
Jej wartość zależy od współczynnika tarcia bocznego pomiędzy oponą a nawierzchnią drogi oraz, jeśli koło jest hamowane, od współczynnika poślizgu hamowanego koła. Im jest on większy, czyli hamowanie silniejsze, tym spadek wartości siły bocznej jest większy. Zablokowanie koła jest równoznaczne z osiągnięciem najmniejszej wartości siły bocznej.
Niekorzystna i niebezpieczna sytuacja powstaje również wówczas, gdy lewe koła pojazdu poruszają się po nawierzchni o innym współczynniku przyczepności niż prawe.
Zachowania samochodu podczas hamowania we wskazanych sytuacjach są tematem tego artykułu.
Hamowanie samochodu poruszającego się po łuku
Rozważanie tego zagadnienia wymaga przypomnienia:
- definicji kąta znoszenia bocznego koła;
- zależności przedstawionej w postaci wykresu pomiędzy siłą boczną (na styku opony i nawierzchni drogi) a kątem znoszenia bocznego koła dla różnych rodzajów nawierzchni i opon (rys. 18, część 3 artykułu, opublikowana w numerze 9/2018 „Nowoczesnego Warsztatu”).
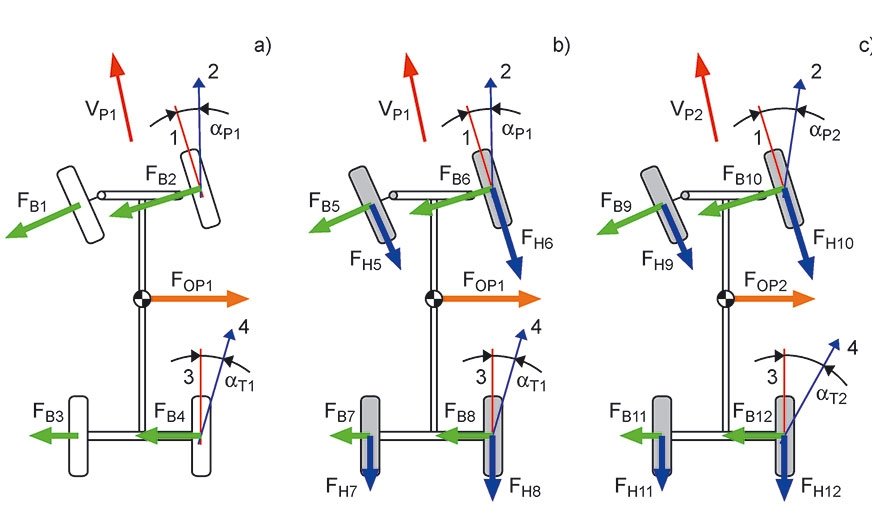
Dla uproszczenia naszych rozważań przyjmuję, że przed hamowaniem samochód poruszał się po łuku w warunkach równowagi, czyli siła odśrodkowa (FOP1, rys. 31a), która na niego działa, była równoważona przez sumę sił bocznych wszystkich kół pojazdu (od FB1 do FB4).
Aby na styku opony i nawierzchni drogi powstała siła boczna, koło musi poruszać się z określoną wartością kąta znoszenia bocznego. W tym przykładzie przyjrzymy się kołom zewnętrznym – przedniemu i tylnemu. Kąt znoszenia bocznego, np. prawego przedniego koła (aP1, rys. 31a), zawiera się pomiędzy płaszczyzną symetrii koła (1) a kierunkiem ruchu koła (2).
Przeanalizujmy zachowanie samochodu jadącego po łuku w chwili rozpoczęcia hamowania (rys. 31b) i już w jego trakcie (rys. 31c).
1. Z chwilą naciśnięcia pedału hamulca rozpoczyna się hamowanie (rys. 31b). Przyjmujemy w tym przykładzie, że żadne z kół nie zostanie zablokowane. Pojawiają się siły hamowania (od FH5 do FH8). Powodują one chwilowe zmniejszenie wartości sił bocznych (od FB5 do FB8), ponieważ maleje wartość współczynnika tarcia bocznego opony o nawierzchnię (rys. 20, część 4 artykułu, opublikowana w numerze 10/2018 „Nowoczesnego Warsztatu”).
2. Bezpośrednio po naciśnięciu pedału hamulca siła odśrodkowa (FOP1) działająca na samochód będzie większa od sumy sił bocznych (od FB5 do FB8, rys. 31b) działających na wszystkie koła pojazdu (przed rozpoczęciem hamowania pomiędzy tymi siłami była zachowana równowaga – rys. 31a). Początkowo nie zmienią się również wartości kątów znoszenia bocznego poszczególnych kół – w naszym przykładzie zewnętrznych kół osi przedniej i tylnej (aP1 i aT1).
3. Dla uzyskania ponownej równowagi pomiędzy siłą odśrodkową (FOP3) a sumą sił bocznych (od do FB12), działających na wszystkie koła pojazdu, muszą wzrosnąć wartości kątów znoszenia dla poszczególnych kół pojazdu. W naszym przykładzie wartości kątów znoszenia kół zewnętrznych osi przedniej i tylnej rosną od wartości αP1 i aT1 (rys. 31a i b) do wartości aP2 i aT2 (rys. 31c).
Poszukiwanie tej równowagi wiąże się z określonym zachowaniem samochodu na łuku. Jeśli kąty znoszenia kół przednich wzrosną o większą wartość niż kąty znoszenia kół tylnych, wówczas zwiększy się promień toru ruchu samochodu (rys. 32a) – mówimy o podsterownym zachowaniu się pojazdu.
Jeśli kąty znoszenia kół tylnych wzrosną o większą wartość niż kąty znoszenia kół przednich, wówczas zmniejszy się promień toru ruchu samochodu (rys. 32b) – mówimy o nadsterownym zachowaniu się samochodu.
Jeśli kąty znoszenia kół przednich i tylnych wzrosną o taką samą wartość, wówczas promień toru ruchu nie zmieni się (rys. 32c), ale samochód wykonuje obrót o określony kąt wokół swojej osi pionowej, w tę samą stronę, w którą skręca, lub inaczej, przód samochodu zbliża się do wewnętrznej, a tył do zewnętrznej strony zakrętu. Mówimy wówczas o neutralnym zachowaniu się samochodu.
Zachowania pojazdu, który jedzie w zakręcie i jest hamowany, proszę nie mylić z tzw. charakterystyką sterowności (pod-, nadsterowną lub neutralną). Przy jej wyznaczaniu samochód przejeżdża zakręt ze stałą prędkością, a więc bez przyspieszania lub hamowania.
Analizując bardziej szczegółowo przypadek hamowania samochodu poruszającego się po łuku (rys. 32), należałoby uwzględnić, że:
- zwiększenie wartości kątów znoszenia bocznego zmniejsza wartości współczynników tarcia wzdłużnego, a w konsekwencji zmniejsza siły hamowania (od FH9 do FH12);
- w trakcie przejazdu łuku i jednoczesnego hamowania zmniejsza się prędkość pojazdu, np. od wartości VP1 do VP2, co ogólnie ujmując, wpływa na zachowanie się samochodu, np. maleje wartość siły odśrodkowej.
W przykładach na rys. 31 i 32 założyliśmy między innymi, że równowaga pomiędzy siłą odśrodkową a siłami bocznymi jest osiągana. Może być jednak tak, że na łuku drogi hamujemy samochód, jadący z prędkością zbliżoną do maksymalnej, z którą dany zakręt można przejechać. Przed rozpoczęciem hamowania siła odśrodkowa jest równoważona siłami bocznymi poszczególnych kół, ale po rozpoczęciu hamowania siły boczne o niższych wartościach mogą nie być w stanie zrównoważyć siły odśrodkowej.
W przykładach na rys. 31 i 32 założyliśmy również, że podczas hamowania nie nastąpi zablokowanie jednego lub więcej kół pojazdu. Teraz, analogicznie jak przy ruchu samochodu po linii prostej (cz. 5 artykułu), przeanalizujemy zachowanie samochodu poruszającego się po łuku i jednocześnie hamowanego, gdy podczas tego hamowania nastąpi zablokowanie przednich, tylnych lub wszystkich kół. W odróżnieniu od ruchu po linii prostej na łuku nastąpi natychmiastowa zmiana toru.
- Jeśli zostaną zablokowane koła osi przedniej (rys. 33a), czyli samochód utraci kierowalność, promień toru ruchu przewidywanego przez kierowcę (T1, rys. 33b) nagle się zwiększy – tor T2. Jeśli kierowca nie będzie przeciwdziałał tej zmianie, to samochód będzie poruszał się po prawie prostym torze ruchu (tor T2) i „opuści” zakręt po jego zewnętrznej stronie. Aby się ratować, kierowca powinien zmniejszyć siłę hamowania (trudne bez treningu) lub przerwać hamowanie – dla odzyskania możliwości kierowania samochodem, a następnie wykonać korektę toru ruchu samochodu, jeśli pozwoli na nią przyczepność opon do nawierzchni.
- Jeśli zablokowane zostaną koła osi tylnej (rys. 34a), czyli samochód utraci stateczność, promień toru ruchu przewidywany przez kierowcę (T1, rys. 34b) nagle się zmniejszy – tor T2. Jeśli kierowca nie będzie przeciwdziałał tej zmianie toru ruchu, to samochód będzie wykonywał obrót wokół swojej osi pionowej i tor ruchu pojazdu będzie się zacieśniał. Samochód może wykonać obrót o znaczy kąt (nawet o pół obrotu lub więcej) i „opuści” zakręt po jego wewnętrznej stronie. Aby się ratować, kierowca powinien wykonać tzw. kontrę kierownicą, np. w sytuacji przedstawionej na rys. 34b należy skręcić kierownicą w prawo, zmniejszyć siły hamowania lub przerwać hamowanie, aby zdecydowanie zwiększyć wartość sił bocznych kół tylnych (FB3 i FB4, rys. 34a).
- Jeśli zostaną zablokowane wszystkie koła pojazdu (rys. 35a), wówczas tor ruchu samochodu, przewidywany przez kierowcę (T1, rys. 35b), odchyli się nagle w kierunku zewnętrznej strony zakrętu – tor T2. Jeśli kierowca nie będzie przeciwdziałał tej zmianie, to samochód zostanie dosłownie wyrzucony na zewnętrzną stronę zakrętu. W stosunku do sytuacji, gdy zablokowaniu ulegną tylko przednie koła samochodu (rys. 33b), samochód opuści drogę ustawiony pod innym kątem względem toru ruchu (rys. 35b), a z praktyki dodam, że uczyni to bardziej „gwałtownie”. Aby się ratować, kierowca powinien natychmiast przerwać hamowanie, aby na wszystkich kołach pojazdu pojawiły się ponownie siły boczne (od FB1 do FB4). Jednak wzrost wartości sił bocznych nie następuje nagle, wymaga określonego czasu, relatywnie krótkiego, ale jednak „trochę” trwa. Mimo przerwania hamowania siły boczne mogą nie „zdążyć” osiągnąć wartości sił bocznych, które powstrzymają samochód przed opuszczeniem drogi.
Hamowanie samochodu poruszającego się po linii prostej na nawierzchni o różnej przyczepności po jego obu stronach
Jeśli spełnione są następujące warunki:
- samochód porusza się po linii prostej,
- jest hamowany na nawierzchni o jednakowej wartości współczynnika tarcia,
- nie występują czynniki zakłócające,
- hamulce są sprawne, a ogumienie właściwe (jednakowe na każdej z osi lub na wszystkich kołach) i panuje w nich prawidłowe ciśnienie,
to suma sił hamowania po lewej stronie samochodu (FHL, rys. 36) będzie równa sumie sił hamowania po prawej stronie samochodu (FHP). Nie występuje wówczas moment obrotowy, który powoduje obrót samochodu wokół jego osi pionowej – samochód zachowa prostoliniowy tor ruchu.
Inaczej będzie wówczas, gdy opony kół obu stron hamowanego pojazdu współpracują z nawierzchnią o różnych wartościach współczynnika tarcia. Jeśli przykładowo (rys. 37a) nawierzchnię po lewej stronie drogi cechuje współczynnik tarcia o wartości wyższej niż nawierzchnię po prawej stronie (na środku drogi może być np. mokry asfalt, a po jej prawej stronie może leżeć warstwa ujeżdżonego śniegu), wówczas podczas hamowania suma sił hamowania po lewej stronie pojazdu (FHL) jest większa niż suma sił hamowania po jego prawej stronie (FHP). Ta różnica sił hamowania spowoduje powstanie momentu obrotowego (MO), który wymusi skręt samochodu w lewą stronę (w kierunku, po którym suma sił hamowania jest większa).
Aby przeciwdziałać tak powodowanej zmianie kierunku ruchu samochodu, kierowca musi skręcić koła przednie w kierunku przeciwnym do tego, w którym samochód sam skręca – na rys. 37b kierowca musi skręcić koła w prawo. Uzyskany w ten sposób moment obrotowy korygujący (MK, rys. 37b) równoważy moment obrotowy (MO) powodowany różną wartością sił hamowania po obu stronach pojazdu. Dzięki tej równowadze samochód porusza się nadal po linii prostej.
Szczególnym wyzwaniem dla kierowcy samochodu bez ABS (tylko takich samochodów dotyczy ta część artykułu) jest hamowanie na nawierzchni o zmiennej skokowo, w sposób przypadkowy, wartości współczynnika tarcia (rys. 38). W zależności od rodzaju nawierzchni, po której w danej chwili porusza się każde z kół samochodu, również w sposób przypadkowy zmieniają się:
- wartości sił hamowania tych kół (od FH1 do FH4);
- sumy sił hamowania po lewej stronie pojazdu (FH1 + FH3) i po prawej stronie pojazdu (FH2 + FH4).
Rzadko występuje równowaga pomiędzy sumami tych sił. W konsekwencji, podczas hamowania samochód w sposób przypadkowy skręca lekko w lewo lub w prawo, o różny kąt.
W przypadku braku układu ABS (tylko w tej sytuacji!) najlepszą metodą jest szybka zmiana nacisku na pedał hamulca, nazywana hamowaniem pulsacyjnym (tylko zmiana siły nacisku, bez zdejmowania nogi z pedału hamulca). Przeważnie skraca to drogę hamowania i uspokaja samochód.
mgr inż. Stefan Myszkowski




Komentarze (0)