




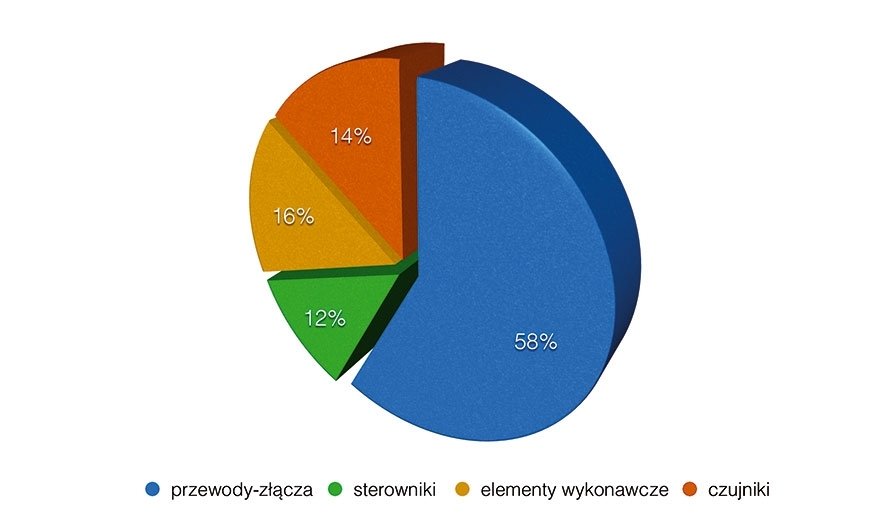
Udział typowych usterek występujących w instalacjach elektrycznych pojazdów samochodowych (autor: M. Leśniewski)
Najpopularniejszym rodzajem magistrali danych występującym w motoryzacji od 30 lat jest magistrala typu CAN.
Dynamiczny rozwój techniki cyfrowej w motoryzacji w ciągu ostatnich trzech dekad spowodował konieczność rozbudowy instalacji elektrycznej samochodu i liczby sterowników ponad 20-krotnie. Sterowniki przetwarzają dane pomiędzy sobą, analizują informacje z poszczególnych czujników i kontrolują pracę podzespołów wykonawczych, realizując skomplikowane programy niezbędne do funkcjonowania danego systemu w pojeździe. Aby proces wymiany danych przebiegał szybko i bez zakłóceń, inżynierowie zdecydowali się na zastosowanie magistrali danych, najpopularniejsza od lat jest ta typu CAN.
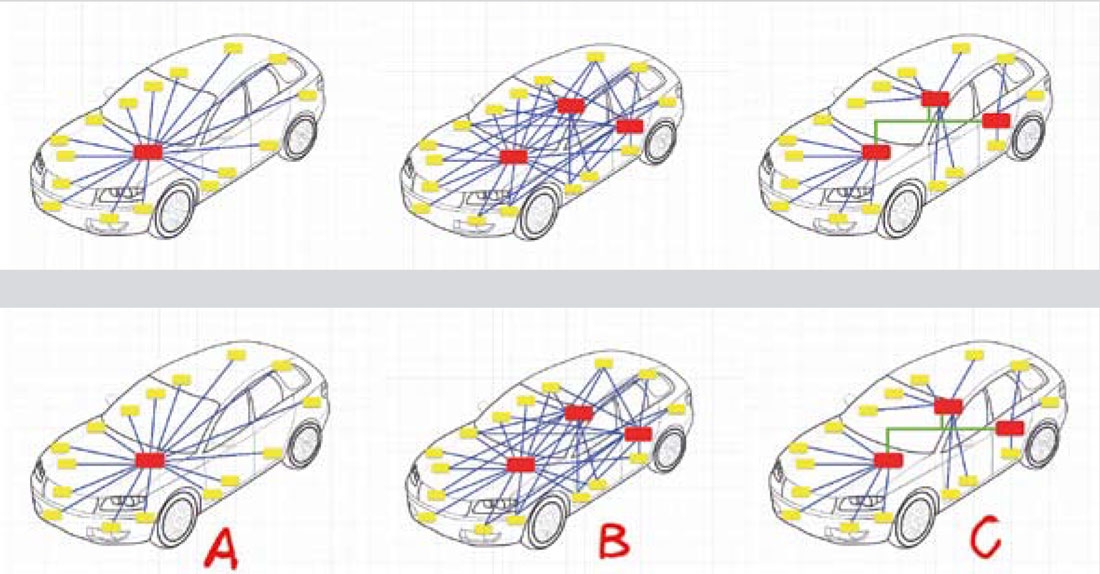
Pomysł zastosowania magistrali wymiany danych na wzór magistrali wykorzystywanej w komputerach osobistych zrodził się już w latach 80. ubiegłego wieku. Prekursorem był koncern Bosch, który rozpoczął prace badawcze nad strukturą instalacji elektrycznych w pojazdach samochodowych. Niemieccy inżynierowie, analizując dynamiczny wzrost podzespołów elektronicznych spowodowany zaadaptowaniem kolejnych systemów (coraz bardziej skomplikowane układy sterujące jednostki napędowej, system ABS, sterownik automatycznej skrzyni biegów), dostrzegli wiele problemów związanych z zastosowaniem większej ilości czujników i elementów wykonawczych. Przede wszystkim znacznemu rozbudowaniu uległa struktura instalacji elektrycznej, w której musiano wprowadzić dodatkowe przewody i złącza wtykowe łączące czujniki i podzespoły wykonawcze współpracujące ze sterownikami nowo zaadaptowanych systemów pojazdu (ilustracja 1).
Kolejnym problemem, który zaczął wyraźnie dominować w rozbudowanych instalacjach elektrycznych, były coraz liczniejsze usterki. Ich głównymi powodami (ilustracja 2) były awarie dotyczące braku styku (złącza wielostykowe) lub nieprawidłowości związane bezpośrednio z przerwą w obwodzie (uszkodzenie wiązki okablowania). Zastosowanie większej ilości przewodów spowodowało również podwyższenie poziomu zakłóceń przesyłanych sygnałów. Skutecznym rozwiązaniem większości problemów związanych z rozbudowaniem instalacji elektrycznych w pojazdach samochodowych było sięgnięcie po rozwiązanie zastosowane w komputerach osobistych.
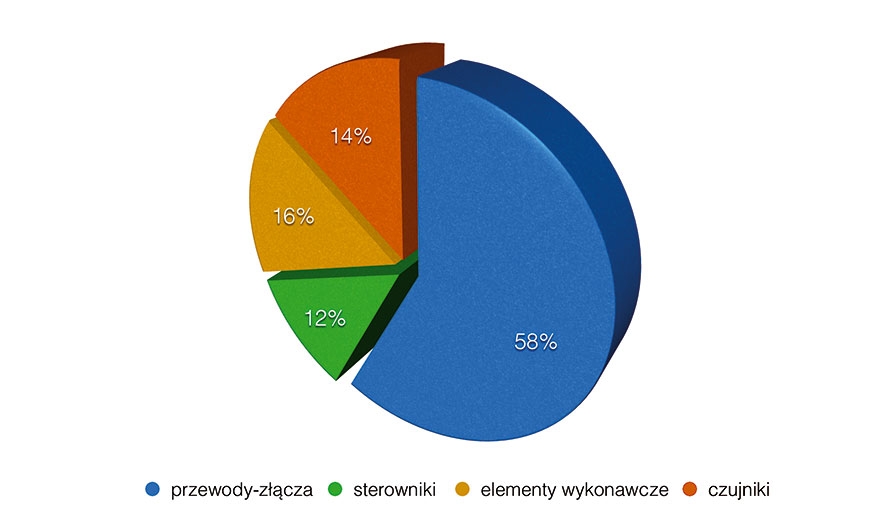
Ilustracja 2. Udział typowych usterek występujących w instalacjach elektrycznych pojazdów samochodowych (autor: M. Leśniewski)
Zdecydowano się na połączenie sterowników poszczególnych systemów pojazdu we wspólną sieć (magistralę danych), która posiadała jednolity protokół wymiany informacji. Informacje w tego typu sieci mogą być przekazywane cyfrowo z wykorzystaniem tradycyjnych miedzianych przewodów instalacji elektrycznej pojazdu.
Zastosowanie magistrali danych typu CAN w samochodach osobowych przyniosło wiele wymiernych korzyści, wśród których najważniejsze to:
- znaczne zmniejszenie ilości złącz i przewodów instalacji elektrycznej, dzięki czemu zredukowano masę pojazdu,
- podwyższenie poziomu niezawodności poszczególnych systemów poprzez zwiększanie wskaźnika odporności na zakłócenia w przesyle sygnałów,
- dzięki otwartej architekturze systemu bardzo łatwe staje się zaadaptowanie kolejnego sterownika,
- cyfrowe dane mogą być przesyłane za pośrednictwem przewodów miedzianych lub światłowodowych,
- rozbudowana diagnostyka sterowników danego systemu,
- ułatwiony nadzór nad transferem przesyłanych danych,
- wprowadzenie szybkich standardów komunikacji uwzględniających priorytet przesyłu informacji pomiędzy poszczególnymi sterownikami (sterownik jednostki napędowej, sterownik ESP/ABS, sterownik komfortu),
- podwyższenie wskaźnika bezpieczeństwa przesyłu danych ze względu na transmisję informacji drogą cyfrową, a nie analogową.
Przesył informacji magistralą CAN charakteryzują zróżnicowane prędkości transmisji tych danych. Pewnym ograniczeniem w początkowych latach zastosowania magistrali były moce obliczeniowe procesorów i rozmiary bufora pamięci. Najwyższe prędkości stosowane są do wymiany sygnałów pomiędzy sterownikami systemów bezpieczeństwa oraz kontrolujących pracę silnika lub automatycznej skrzyni biegów. Dla przykładu koncern Volkswagen przyjął standard prędkości wymiany danych według poniższego schematu.
1. Magistrala CAN napędu (High Speed CAN), gdzie szybkość przesyłu danych wynosi od 500 kbit/s do 1000 kbit/s. Tak wysokie prędkości wymiany informacji są przyporządkowane dla sterowników: układu ESP/ABS, jednostki napędowej, automatycznej skrzyni biegów, poduszek bezpieczeństwa, systemów wspomagających kierowcę. Uwzględniając wysoką szybkość transferu danych pomiędzy poszczególnymi sterownikami, można przyjąć, iż informacje magistrali CAN napędu wymieniane są praktycznie w czasie rzeczywistym.
2. Magistrala CAN komfortu (Low Speed CAN), w której prędkość transmisji wynosi od 100 kbit/s do 500 kbit/s, a wymiana danych dokonywana jest pomiędzy sterownikami komfortu (klimatyzacja, szyby elektryczne).
3. Magistrala CAN Infotainment (Low Speed CAN) z zakresem szybkości wymiany danych od 100 kbit/s do 500 kbit/s, obejmująca sterowniki systemów multimedialnych (audio, nawigacja).







Komentarze (0)