




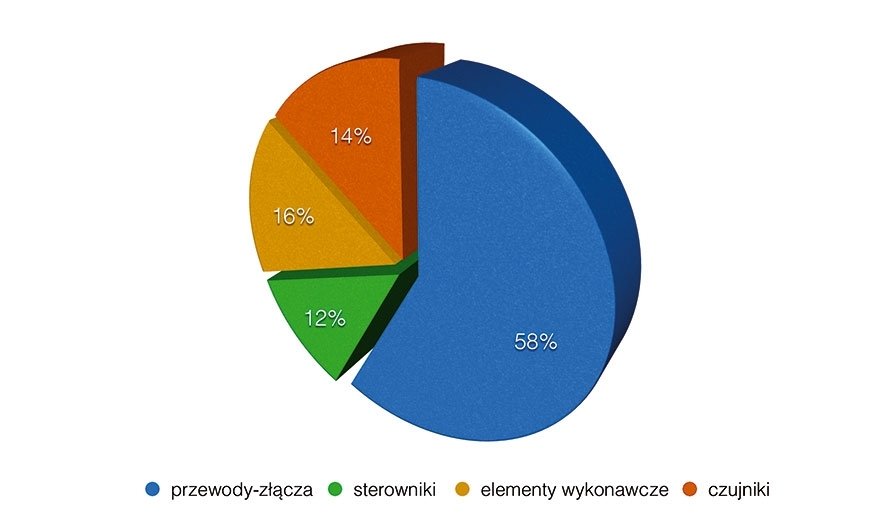
Udział typowych usterek występujących w instalacjach elektrycznych pojazdów samochodowych (autor: M. Leśniewski)
Gdyby w dużym uproszczeniu przedstawić proces wymiany informacji magistrali danych typu CAN, należałoby przyjąć pewne wstępne założenia. Jeżeli brana byłaby pod uwagę wymiana danych pomiędzy trzema sterownikami, to muszą one reprezentować jednolity standard transmisji oraz jej format. Dla lepszego zobrazowania omawianego przykładu możemy założyć przesył informacji pomiędzy sterownikiem jednostki napędowej a sterownikami: ESP/ABS i automatycznej skrzyni biegów. Pakiet wysyłanych danych będzie dotyczył prędkości obrotowej silnika i zostanie przesłany według zasady „Broadcast”, którą cechuje to, iż jeden sterownik przesyła informacje (w tym przypadku sterownik silnika), a pozostałe dwa (ESP/ABS i automatycznej skrzyni biegów) odbierają dane. Realizacja przesyłu i odbioru danych wymaga transformacji ich zawartości z formatu czysto fizycznego (np. 2500 obr./min) do formatu wartości ciągu zer i jedynek (format binarny sygnału). Kolejnym krokiem jest zamiana formy binarnej na strumień odpowiadających jej bitów i przesłanie do specjalnego wzmacniacza pełniącego rolę odbiornika-nadajnika (nazywanego również „tranceiver”) w sterowniku.
Końcowym etapem jest przetworzenie w nadajniku-odbiorniku strumienia bitów na sygnały napięciowe i wysłanie ich do przewodu magistrali CAN. Przewodem sieci CAN sygnały napięciowe trafiają do nadajników-odbiorników w sterownikach systemu ESP/ABS i automatycznej skrzyni biegów. Przyjęcie paczki danych (prędkość obrotowa silnika 2500 obr./min) poprzedza zamiana wartości sygnału napięciowego na strumień bitów, a następnie przetworzenie ich w strefie wewnętrznej danego sterownika na postać binarną i w finalnej fazie przekształcenie w formę fizyczną (2500 obr./min), zrozumiałą dla algorytmu programu sterownika. Ze względu na priorytetowe kwestie dotyczące bezpieczeństwa przesyłu danych i redukcji potencjalnych zakłóceń stosuje się komunikację dwuprzewodową. Przewody magistrali danych są ze sobą skręcone w tzw. skrętkę, gdzie jeden z przewodów określany jest jako „high”, natomiast drugi nazywany „low”, a wysyłane sygnały napięciowe są symetryczne względem siebie (ilustracja 3).

Mariusz Leśniewski







Komentarze (0)