





Przed konstruktorami samochodów postawiono cel – opracowanie i wdrażanie układów, które pomogą zmniejszyć liczbę ofiar i rannych na drodze, często w następstwie małego błędu. Aby ten cel osiągnąć, coraz więcej pojazdów standardowo wyposażana jest w układy ABS i ESP. Niebawem do obowiązkowego wyposażenia pojazdów dołączą: układ pomiaru ciśnienia w ogumieniu, adaptacyjny tempomat i asystent pasa ruchu.
Aby wykorzystać możliwości większości wymienionych układów, kierowca powinien wiedzieć, jak z nimi współpracować (tego trzeba się nauczyć), a pracownicy serwisów powinni umieć obsługiwać samochody wyposażone w te układy.
Co to są procedury kalibracyjne powiązane z regulacją ustawienia kół pojazdu?
Są to procedury, które dotyczą układów: stabilizacji toru jazdy, adaptacyjnego tempomatu oraz asystenta pasa ruchu. Producent pojazdu określa okoliczności, po wystąpieniu których konieczne jest ich wykonanie. Jedną z nich jest uprzednia regulacja ustawienia kół lub osi pojazdu. Pracownik serwisu, przystępując do regulacji ustawienia kół lub osi pojazdu, który jest wyposażony w wymienione układy, powinien wiedzieć o tych procedurach. Jeśli nie może ich wykonać, powinien ograniczyć się tylko do pomiarów ustawienia kół lub osi bez ewentualnej regulacji, jeśli będzie ona konieczna. Regulacja ustawienia kół lub osi, bez wykonania koniecznych kalibracji, może spowodować nieprawidłową pracę układów, których te kalibracje dotyczą. Nie oznacza to jednak, że należy niezwłocznie wymieniać posiadane urządzenie do pomiaru ustawienia kół i osi. Trzeba jedynie pamiętać, że w niektórych pojazdach nie należy wykonywać regulacji ustawienia kół i osi. Jeśli jednak w najbliższej przyszłości myślimy o zakupie nowego urządzenia do pomiarów ustawienia kół i osi, a stać nas na zakup urządzeń z „wyższej półki”, sugeruję sprawdzić, które z urządzeń oferowanych na rynku, po zakupie współpracujących z nimi dodatkowych przyrządów lub urządzeń, umożliwią wykonywanie omawianych w tym artykule procedur kalibracyjnych.

Zerowanie czujnika kąta skrętu kierownicy, układu stabilizacji toru jazdy
W samochodach wyposażonych w układ stabilizacji toru jazdy (ESP, DSC, ESC, VDC):
- zaleca się po każdej regulacji ustawienia kół i osi;
- konieczne jest po każdej regulacji ustawienia kół i osi, podczas której była regulowana zbieżność kół tylnych pojazdu, zerowanie czujnika kąta skrętu kierownicy.
Gdy samochód jedzie na wprost, czujnik ten musi informować sterownik układu stabilizacji toru jazdy o tym, że kąt skrętu kierownicy jest równy zeru. Oczywiście również kierownica powinna być ustawiona do jazdy na wprost, co gwarantuje, że przy jeździe na wprost nie pracuje układ wspomagania.
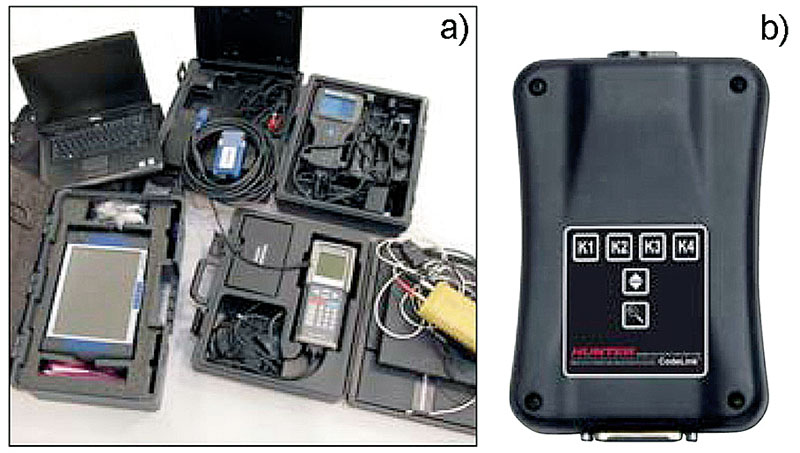
Wykonanie zerowania czujnika kąta skrętu kierownicy jest możliwe przy wykorzystaniu „fabrycznego” lub porównywalnego z nim testera układów elektronicznych dla pojazdu danej marki (rys. 1a). Rzadko jednak nawet serwis wykonujący również diagnostykę silników posiada testery odpowiednie dla pojazdów różnych marek. Ponadto każdy z „fabrycznych” testerów ma specyficzny dla danej marki przebieg takiej procedury kalibracyjnej.
Firma Hunter oferuje moduł o nazwie CodeLink (rys. 1b), który umożliwia zerowanie czujnika kąta skrętu kierownicy m.in. w samochodach marek: Audi, BMW, Lexus, Mini, Toyota, Volkswagen. Moduł CodeLink (1, rys. 2) przyłączany jest do gniazdka diagnostycznego pojazdu i może komunikować się bezprzewodowo z urządzeniem (2) do pomiaru geometrii kół i osi firmy Hunter. Procedura zerowania czujnika kąta skrętu kierownicy wykonywana modułem CodeLink przebiega w ten sam sposób, niezależnie od marki pojazdu i jest częścią programu do pomiarów i regulacji ustawienia kół i osi.
Kalibracja radaru adaptacyjnego tempomatu
Adaptacyjny tempomat, oznaczany skrótami ACC lub ADR to układ, który automatycznie dla aktualnej wartości współczynnika tarcia nawierzchni drogi (układ ją szacuje):
- utrzymuje zadaną przez kierowcę prędkość jazdy, jeśli odległość od poprzedzającego pojazdu jest większa od minimalnej bezpiecznej odległości;
-zmniejsza prędkość pojazdu dla utrzymania minimalnego bezpiecznego odstępu od pojazdu poprzedzającego;
- zwiększa prędkość pojazdu maksymalnie do wartości zadanej przez kierowcę, jeśli odległość od poprzedzającego pojazdu jest większa niż minimalna bezpieczna odległość od poprzedzającego pojazdu.
„Okiem” adaptacyjnego tempomatu jest radar, który obserwuje obiekty znajdujące się przed pojazdem. Dzięki niemu możliwe jest określenie ich odległości, prędkości poruszania się oraz kąta położenia w stosunku do pojazdu z zamontowanym radarem.
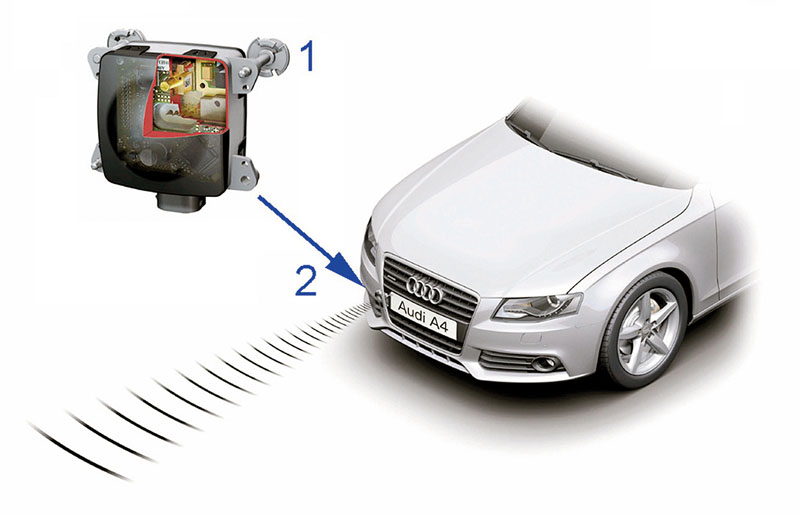
Przykładowo radar LRR3 firmy Bosch wykorzystuje wiązkę promieniowania o częstotliwości od 76 do 77 GHz. Wiązka o kącie rozsyłu 30o umożliwia kontrolę przestrzeni przed pojazdem z radarem (w zakresie od 0,5 do 250 m) oraz rozróżnienie do 32 obiektów znajdujących się przed pojazdem z radarem. Radar (1, rys. 3) o takiej konstrukcji montowany jest np. w zderzaku (2) samochodów firmy Audi 4.
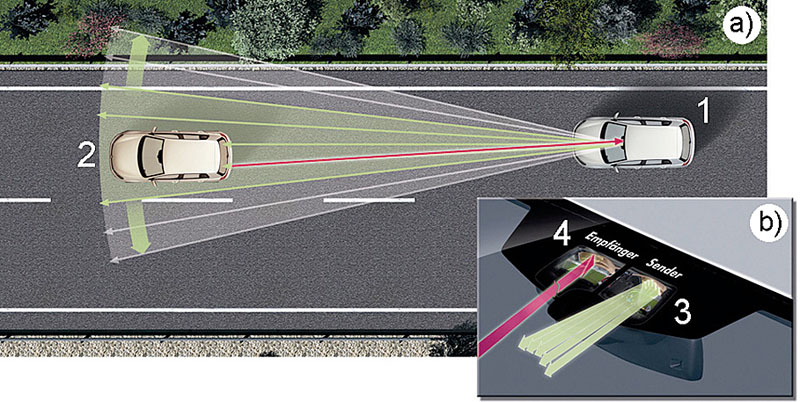
Radar o innej konstrukcji montowany jest w samochodach VW Golf (1, rys. 4a). Wykorzystuje on pięć strumieni laserowych, dlatego nazywany jest również lidarem. Lokalizuje on pojazdy (2) przed pojazdem (1) z radarem. Źródło promieniowania laserowego (3, rys. 4b) i odbiornik (4) odbitych strumieni laserowych są zamontowane za przednią szybą, na wysokości lusterka wewnętrznego.
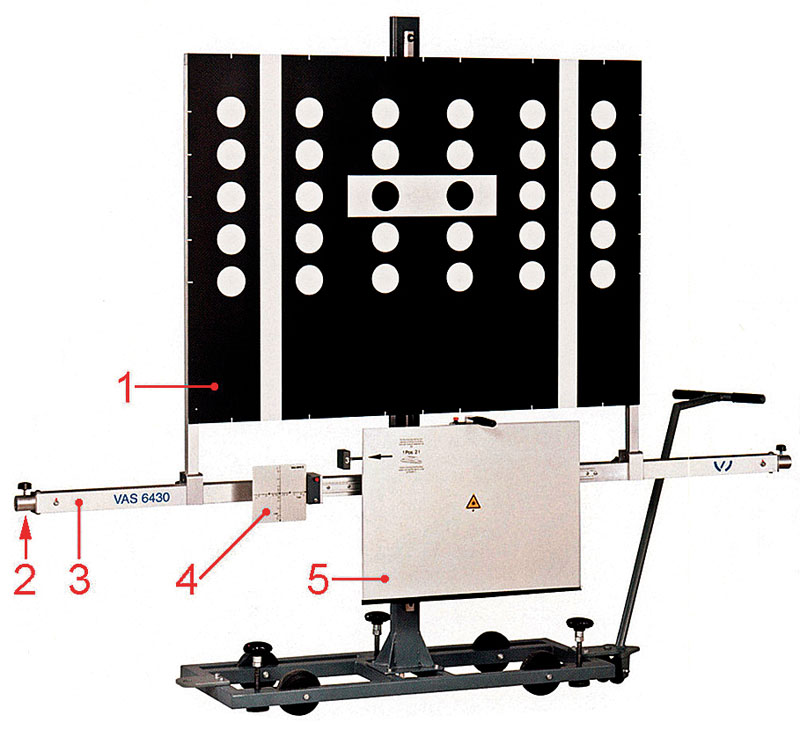
Regulacja zbieżności kół tylnych pojazdu jest jedną z czynności, po której konieczna jest tzw. „warsztatowa” kalibracja radaru adaptacyjnego tempomatu. W tym celu konieczne jest użycie przyrządu zaprezentowanego na rys. 5. Umożliwia on kalibrację radaru adaptacyjnego tempomatu, zarówno samochodów firmy Audi – służy do tego przyrząd nr 5, jak i samochodów VW – służy do tego przyrząd nr 4.
Bazą do kalibracji radarów obu typów jest oś geometryczna jazdy, którą wyznacza zbieżność kół osi tylnej. Oś ta wyznacza kierunek, w którym „chce jechać” oś tylna samochodu. Aby radar pracował prawidłowo, przy jeździe na wprost musi on patrzeć „przed siebie”. Oś wiązki promieniowania wysyłanego przez radar musi być równoległa do osi geometrycznej jazdy.
Oś geometryczna jazdy może jednak nie leżeć w płaszczyźnie symetrii nadwozia. Wówczas przy jeździe na wprost nadwozie jest ustawione skośnie do osi geometrycznej jazdy. Dla kierowcy jest to niezauważalne, ale radarowi takie skośne ustawienie nadwozia uniemożliwia prawidłową pracę. Jego kierunek „patrzenia” jest wówczas odchylony trochę w stronę lewego lub prawego pobocza.
Aby przy jeździe na wprost radar „patrzył przed siebie”, konieczna jest regulacja ustawienia radaru, tak aby radar wysyłał wiązkę promieniowania równolegle w stosunku do osi geometrycznej jazdy. Nazywamy to kalibracją radaru adaptacyjnego tempomatu. Do jej wykonania niezbędne jest stanowisko wyposażone tak, jak przedstawia to rys. 6. Na tym stanowisku dla samochodu firmy Audi strumień promieni radaru adaptacyjnego tempomatu jest odbijany przez lustro (2). Położenie osi geometrycznej jazdy jest wyznaczane przez dwie kamery (3), które śledzą ustawienie głowic pasywnych zamontowanych na kołach tylnych, co ilustruje kierunek (4) na rys. 6.
Kalibracja kamery asystenta pasa ruchu
Asystent pasa ruchu, nazywany Spurhalteassistent lub oznaczany skrótem LDW (z j. ang.), ma za zadanie:
- rozpoznanie pasa ruchu na podstawie pasów malowanych na jezdni;
- samoczynne korygowanie kierunku jazdy samochodu celem utrzymania samochodu na pasie ruchu, a jeśli to działanie nie jest wystarczające – ostrzeżenie kierowcy o konieczności korekty toru ruchu pojazdu;
- wykrycie, że kierowca nie trzyma rąk na kierownicy.

Droga jest obserwowana przez kamerę (1, rys. 7) umieszczoną za przednią szybą, na wysokości lusterka wewnętrznego. Obserwuje nawierzchnię drogi w odległości od 5,5 do 60 m przed samochodem. Kamera (1) widzi obraz przedstawiony na rys. 8a. Potrafi ona rozróżnić 4096 stopni szarości (oko ludzkie rozróżnia od 100 do 120 stopni szarości) i rejestruje 25 obrazów na sekundę (oko ludzkie może zarejestrować do 9 obrazów, które mogą zostać przeanalizowane). Dzięki tym cechom kamery obróbka cyfrowa przekazanego przez nią obrazu nawierzchni drogi umożliwia zidentyfikowanie linii (2, rys. 8b) na niej namalowanych, co z kolei umożliwia wyznaczenie środka pasa ruchu (3). Jeśli asystent pasa ruchu pracuje w trybie aktywnym, o czym kierowca jest informowany symbolem w zestawie wskaźników (2, rys. 7), silnik elektrycznego układu wspomagania kierownicy (3) zmienia ustawienie kół przednich tak, aby utrzymać samochód na środku pasa ruchu (4). Jeśli asystent pasa ruchu nie może sprostać temu zadaniu, kierowca jest informowany o konieczności wykonania przez niego korekty toru jazdy.
Układ ten wymaga wykonania tzw. kalibracji statycznej, nazywanej również kalibracją „warsztatową”. Wymagana jest ona po:
- regulacji zbieżności kół tylnych pojazdu;
- wykonaniu prac przy pojeździe, które zmieniły wysokości nadwozia względem podłoża.

Stanowisko do wykonania kalibracji kamery asystenta pasa ruchu dla samochodów firm Audi i VW jest podobne do przedstawionego na rys. 6. Drogę z namalowanymi na niej liniami zastępuje tablica (1). Urządzenie do pomiaru geometrii kół i osi służy do wyznaczenia osi geometrycznej jazdy na podstawie zbieżność kół osi tylnej.

Wymagane jest również określenie położenia nadwozia względem podłoża przez pomiar (dla każdego z kół) odległości X (rys. 9) pomiędzy punktem N dolnego obrzeża wnęki koła a osią obrotu koła. Wymiar X mierzy diagnosta lub, jeśli to możliwe, urządzenie do pomiaru geometrii kół i osi. Informacje o: położeniu osi geometrycznej jazdy oraz o położeniu nadwozia względem podłoża są, przykładowo w samochodach marki VW, wprowadzane za pomocą testera VAS 5052 lub VAS 5051B do sterownika asystenta pasa ruchu celem określenia:
- wysokości położenia kamery;
- kąta obrotu kamery w płaszczyźnie poziomej;
- kąta nachylenia wzdłużnego kamery;
- kąta nachylenia poprzecznego kamery.

Po wykonaniu „warsztatowej”, statycznej kalibracji kamery asystenta pasa ruchu podczas jazdy przeprowadza on automatycznie kalibrację dynamiczną. Nie zastępuje ona kalibracji „warsztatowej” – statycznej.
mgr inż. Stefan Myszkowski







Komentarze (0)